
مقدمه
امروزه موتور سوئیچ رلوکتانسی به خاطر ویژگیها و مزایای قابل توجه ای چون ساختار ساده و مقاوم، هزینه ساخت کم، قابلیت اطمینان زیاد و بازده بالا مورد توجه بسیاری از محققان و اندیشمندان در حوزه ماشینهای الکتریکی قرار گرفته است. در کنار این مزایا، این موتور دارای عیوبی چون ریپل گشتاور، لرزش و نویز صوتی است که عملکرد نامطلوب آنرا موجب می شوند و برای کاهش اثر آنها باید راهکاری در نظر گرفته شود. در کاربردهایی مثل دوچرخه الکتریکی احتیاج به موتوری با بازده زیاد، چگالی گشتاور بالا و ریپل گشتاور تا حد امکان کم می باشد و برای این منظور اخیراً در مراجع نوع روتور خارجی موتور سوئیچ رلوکتانسی پیشنهاد شده است. همانند نوع مرسوم (روتور داخلی) عیوبی مثل ریپل گشتاور در این نوع موتور نیز وجود دارد که با طراحی مناسب ابعاد موتور می توان اثر آنرا تا جای ممکن کاهش داد.
در این مطلب با هدف کاهش ریپل گشتاور و بدست آوردن بازده و سطح متوسط گشتاور مناسب، بهبودسازی یک موتور سوئیچ رلوکتانسی روتور خارجی جهت کاربرد در دوچرخه الکتریکی انجام می شود. فرآیند موردنظر شامل یافتن مقدار کمان قطب های روتور و استاتور بهینه است که شبیه سازی آن در نرم افزار ماکسول انجام خواهد شد.
تقسیم بندی موتورهای سوئیچ رلوکتانسی
در حالت کلی موتورهای سوئیچ رلوکتانسی نوع استوانه ای دوبل برجسته به دو دسته تقسیم می شوند:
الف) روتور داخلی
ب) روتور خارجی
موتور نوع روتور خارجی همانند روتور داخلی از سه قسمت اصلی استاتور، روتور و سیم پیچی های تحریک متمرکز (که به دور قطبهای استاتور پیچیده شده اند) تشکیل شده است. در موتورهای نوع روتور داخلی، روتور در مرکز و استاتور در پیرامون آن قرار دارد، اما در نوع روتور خارجی، روتور در بیرون استاتور قرار دارد. مدل دوبعدی و سه بعدی از یک نمونه موتور نوع روتور خارجی در شکل 1 نشان داده شده است.
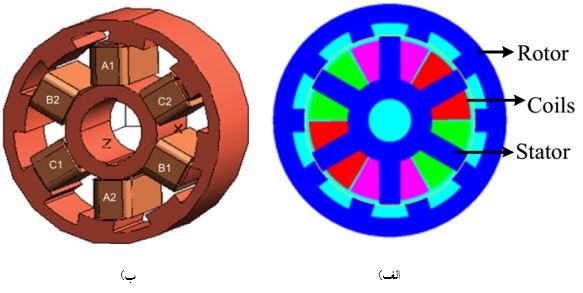
شکل 1) موتور سوئیچ رلوکتانسی روتور خارجی، الف) نمای دوبعدی، ب) نمای سه بعدی
توجه می کنیم که تعداد قطبهای استاتور می تواند کمتر یا بیشتر از تعداد قطبهای روتور باشد، اما برای بدست آوردن ظرفیت گشتاور بر حجم بالا و ریپل گشتاور کمتر بهتر است که تعداد قطبهای روتور بیشتر از استاتور طراحی شود. در ساخت و ساز موتور ، هسته استاتور و روتور به صورت مورق ساخته شده و جنس ورقه های آنها از فولاد آلیاژی (به طور معمول فولاد سیلیکونی غیرجهت دار) انتخاب می شود. برای به حرکت درآوردن محور، ابتدا باید استاتور را بر روی یک قسمت ساکن قرار داد و سپس روتور را داخل یک نگه دارنده به صورت ثایت تعبیه کرد. از طرفی محور موتور نیز به نگهدارنده متصل شده و سپس مجموع روتور، نگهدارنده و محور حول استاتور قرار داده می شود. با تحریک پی در پی سیم پیچ ها و فعل و انفعال صورت گرفته بین استاتور و روتور، روتور به همراه نگهدارنده خود شروع به حرکت کرده و موجب حرکت محور می شود. در نهایت حرکت محور به بار متصل به موتور اعمال می شود.
مزایای موتور سوئچی رلوکتانسی روتور خارجی
در این نوع موتور، برخلاف نوع روتور داخلی، قطبهای روتور کوتاهتر درنظر گرفته می شوند، همچنین فضای لازم برای تعییه سیم پیچ ها در شیار بیشتر از نوع روتور داخلی است، در نتیجه می توان تعداد دور سیم پیچی را افزایش داده و برای کاهش مقاومت سیم پیچی بر فاز، از سیم هایی با سطح مقطع بزرگتر استفاده کرد.
باید توجه کرد که سیم پیچی های قطبها و سیستم خنک کنندگی در این نوع موتور، به محور نزدیکتر بوده که منجر به افزایش شعاع شکاف هوایی و در نتیجه نسبت گشتاور بر آمپر موتور می شود. این خود موجب کاهش اندازه و هزینه مبدل لازم برای تحریک سیم پیچی های موتور می شود.
بنابراین به طور خلاصه می توان مزایای موتور نوع روتور خارجی را نسبت به روتور داخلی به صورت زیر بیان کرد:
1) امکان طراحی موتور برای گشتاور بالا در حجمی کوچکتر
2) فضای در دسترس بیشتر برای شیار استاتور جهت سیم بندی قطبهای استاتور با سطح مقطع بزرگتر و تعداد دور سیم بیشتر
3) امکان خنک شوندگی بهتر به جهت قرارگرفتن استاتور و سیم بندی قطبهای آن نزدیک به مرکز موتور
4) امکان دستیابی به بازده زیادتر در حجمی کمتر
مختصری در مورد دوچرخه الکتریکی
این وسیله به عنوان یک دوچرخه پدالی مرسوم در نظر گرفته می شود که با ماشین الکتریکی، باتری و تجهیزات یدکی دیگر تجهیز شده است. در این وسیله پدال انسانی و توان موتور، هر دو برای به جلو راندن راننده استفاده می شوند. دوچرخه الکتریکی دارای مزیت ذخیره سازی هزینه های مسافرتی راننده به طور قابل ملاحظه ای می باشد. با یک شارژ کامل، یک دوچرخه الکتریکی معمولی تجاری می تواند مسافتی در حدود 20 تا 30 کیلومتر را طی کند. طراحی یک دوچرخه الکتریکی عملکرد بالا و هزینه پایین، هدف اصلی تعداد زیادی از تولیدکنندگان آن می باشد و مستلزم طراحی یک قطار توان با کیفیت شامل ماشین رانشی الکتریکی، کنترل کننده الکترونیکی، بسته باتری و شارژکننده می باشد
باتری که از نوع شارژی است، تأمین کننده ولتاژ موردنیاز برای کارکرد ماشین الکتریکی است و می تواند از نوع لیتیم – آنید سبک وزن انتخاب شود. کار شارژکننده هم تبدیل برق معمول شهری (220 ولت تکفاز) به ولتاژ کاری باتری و شارژ آن می باشد. ماشین الکتریکی به طور معمول در میانه چرخ عقب قرار گرفته و کار به حرکت درآوردن چرخ و به جلوراندن دوچرخه را انجام می دهد و باید دارای توان و گشتاور لازم برای انجام این کار باشد. در نهایت کار کنترل کننده نیز کنترل شارش توان از باتری به ماشین الکتریکی است و این شارش توان به صورت موازی با توان تحویل داده شده بوسیله دوچرخه سوار از طریق پدال دوچرخه عمل می کند. مهمترین قسمت مربوط به ماشین الکتریکی رانشی برای دوچرخه الکتریکی می باشد که در طراحی آن باید به توان و گشتاور موردنیاز و فضای دردسترس برای قرارگیری آن در میانه چرخ توجه ویژه ای صورت گیرد.
موتور سوئیچ رلوکتانسی مورد مطالعه
موتور سوئیچ رلوکتانسی موردنظر در این تحقیق، یک موتور سه فاز از نوع روتور خارجی با توان 500 وات است که دارای 6 قطب در استاتور و 10 قطب در روتور است. طراحی اولیه این موتور در مرجع برای کاربرد سرعت پایین در دوچرخه الکتریکی ذکر شده و در این تحقیق مسئله کاهش ریپل گشتاور و بازده آن مورد بررسی قرار می گیرد.
در موتور سوئیچ رلوکتانسی پیش فرض تعداد قطبهای استاتور و تعداد قطبهای روتور به ترتیب برابر 6 و 10 می باشد، بنابراین مینیمم مقدار زاویه کمان استاتور و کمان روتور طبق فرمول های طراحی، باید 12 درجه و مجموع آنها کمتر از 36 درجه باشد. مقدارهای اولیه درنظر گرفته شده با توجه به مرجع [1] برابر 15 و 16 درجه است که در شرایط ذکرشده صدق می کند و برای شبیه سازی اولیه منظور می شود.
جهت کارکرد مناسب موتور در نقطه کار، سیم پیچی های آن باید به درستی تحریک شوند، به همین منظور از مدار تحریک نشان داده شده در شکل 2 برای اعمال ولتاژ مناسب به سیم پیچها استفاده شده است. بعلت اینکه نقطه کار در رنج سرعت پایین قرار دارد، مد کنترل جریان تحریک در مدار موردنظر بکار رفته است، به صورتیکه جریان سیم پیچی با استفاده از کلیدهای کنترلی در حد مشخصی محدود می شود.
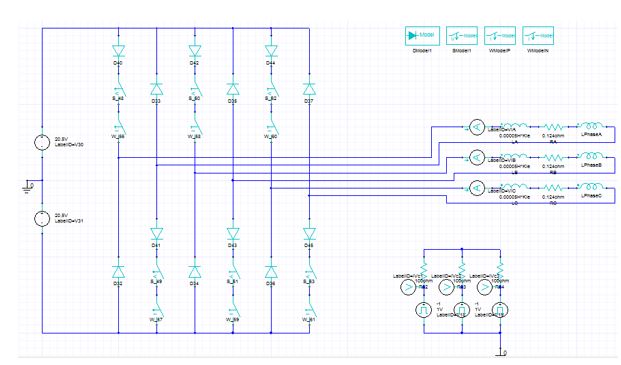
شکل 2) مدار تحریک سیم پیچی های فازهای موتور در ماکسول
پارامترهای مهمی که باید در این مدار تحریک تنظیم شوند، دوره تناوب، دوره هدایت و زاویه های کلیدزنی است. برای موتور موردنظر تحقیق با توجه به تعداد 10 قطب روتور، مقدار دوره تناوب از فرمول زیر بدست می آید:

که برابر با 36 درجه بدست می آید. همچنین مقدار حداقل و حداکثر دوره هدایت از فرمول های زیر محاسبه می شود:

که با توجه به سه فاز بودن موتور، مقدار حداقل و حداکثر دوه هدایت به ترتیب برابر 12 و 18 درجه بدست می آید. برای تنظیم دوره هدایت در مدار تحریک باید عددی بین این دو را در نظر گرفت که برای مد کنترل جریان بهتر است عدد انتخابی از نیمه بازه فوق به بالا انتخاب شود.
شبیه سازی موتور در محیط المان محدود
محیطی که برای تحلیل و بدست آوردن شکل موجهای موتور در نظر گرفته شده، محیط دوبعدی نرم افزار ماکسول می باشد که با توجه به ابعاد اولیه، استاتور، روتور و سیم پیچهای تحریک در آن طراحی شده و بعد از تنظیمات برنامه و مش بندی مناسب قسمتهای مختلف (خصوصاً شکاف هوایی)، با اعمال تحریک مناسب به سیم پیچها از طریق مدار خارجی، موتور در سرعت نامی عمل کرده و متوسط گشتاور نامی را تولید می کند.ن مای دوبعدی از موتور سوئیچ رلوکتانسی روتور خارجی با ساختار اولیه کمان قطبهای استاتور و روتور در شکل 3 نشان داده شده است.
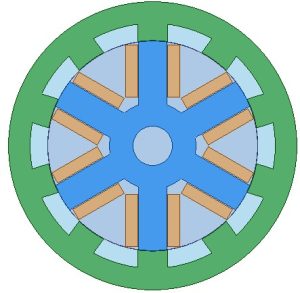
شکل 3) موتور سوئیچ رکوتانسی روتور خارجی 6 به 10 قطب در ماکسول
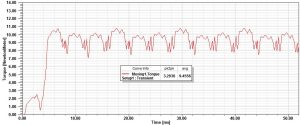
در ادمه نتایج مربوط به شبیه سازی موتور سوئیچ رلوکتانسی ارائه شده است. در شکل 4 مشخصه گشتاور دینامیکی ارائه شده که بر اساس آن، مقدار متوسط گشتاور 9.93 نیوتن بر متر و ریپل گشتاور با توجه به مقدار پیک تو پیک 5.2 ، برابر با 52.4 درصد می باشد.
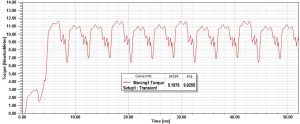
شکل 4) مشخصه گشتاور دینامیکی موتور سوئیچ رلوکتانسی اولیه
در شکل 5 نیز مشخصه جریانهای موتور نشان داده شده که با توجه به شکل، مقدار ماکزیمم جریان حدود 25.5 آمپر است.
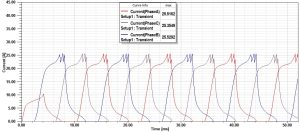
شکل 5) مشخصه جریان های سه فاز موتور با ساختار اولیه
فرآیند بهینه سازی برای کاهش ریپل گشتاور
بعد از شبیه سازی موتور با مشخصات اولیه، به سراغ فرآیند بهینه سازی با هدف اصلی کاهش ریپل گشتاور می رویم. در این مرحله با انجام آزمایشهای مختلف، کمان قطب استاتور و روتور تغییر داده می شود تا حالتی با کمترین سطح ریپل مشخص شود. مقدارهای اولیه کمانهای قطب استاتور و روتور به ترتیب 15 و 16 درجه بوده و در هر بار تغییر، همانند مرجع [1] ، فاصله بین این دو کمان یک درجه خواهد بود. با توجه به شبیه سازی های متعدد، در نهایت مشخص می شود که به ازای زوایای 15.5 و 16.5 کمترین سطح ریپل گشتاور حاصل شده است. بنابراین موتور با این دو کمان به عنوان مدل بهبودیافته در مرحله اول، به مرحله دوم فرآیند کاهش ریپل گشتاور معرفی می شود.
نتایج مربوط به شبیه سازی موتور بهینه شده در ادامه ارائه شده است. با توجه به مشخصه گشتاور در شکل 6 مقدار متوسط گشتاور 9.46 نیوتن بر متر و ریپل گشتاور با توجه به مقدار پیک تو پیک 3.28، برابر با 34.67 درصد می باشد.
شکل 6) مشخصه گشتاور دینامیکی موتور سوئیچ رلوکتانسی بهینه شده
در شکل 7 نیز مشخصه جریانهای موتور نشان داده شده که با توجه به شکل، مقدار ماکزیمم جریان حدود 25.5 آمپر است.
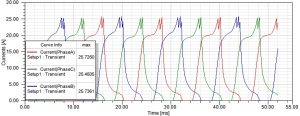
شکل 7) مشخصه جریان های سه فاز موتور بهینه شده
بنابراین با توجه به نتایج موتور بهینه شده می تواند متوسط توانی در حد 495 وات تولید کند و ریپل گشتاور آن نیز نسبت به ساختار اولیه به مراتب کمتر است که آن را برای کاربرد دوچرخه الکتریکی مناسب می کند.
—————————————————————————————————————
توجه
برای خرید فایلهای مربوط به شبیه سازی ها می توانید از لینک خرید استفاده کنید. با در اختیارداشتن شبیه سازی ها قادر خواهید بود که تمام مشخصات خروجی را به دقت مورد بررسی قرار دهید. همچنین یک گزارش کار 20 صفحه ای به فرمت ورد از توضیحات و نتایج شبیه سازی ها برای این پروژه در نظر گرفته شده که همراه با شبیه سازی ها به شما ارائه خواهد شد.
———————————————————————————————————-
مرجع:
[1]
J. Lin, N. Schofield and A. Emadi, “External-Rotor 6 –10 Switched Reluctance Motor for an Electric Bicycle”, IEEE TRANS. On TRANSPORTATION ELECTRIFICATION, v. 1, n. 4, December 2015.
