
مقدمه
مزایایی چون بازده زیاد، چگالی گشتاور حالت ماندگار بالا و کنترلر ساده باعث می شود که درایو موتورهای سنکرون مغناطیس دائم در مقایسه با درایو موتور القایی جایگزین خوبی برای کاربردهای معین باشد. از طرفی در دسترس بودن وسائل الکترونیک قدرت هزینه پایین و بهبود مشخصات آهنربایی، موتورهای مغناطیس دائم را قادر می سازد که حتی در بعضی کاربردها که تقاضای بیشتری برای آن وجود دارد، قابل استفاده باشند.
در راه کار کنترل برداری، که اغلب در درایوهای موتور مغناطیس دائم بکار برده برده می شود، تلاش برای دستیابی به نسبت بیشینه گشتاور بر جریان (MTPA) جهت کمینه سازی تلفات مسی و تلفات هدایت اینورتری امر مطلوبی به شمار می رود. MTPA به معنی این است که جریانهای مؤلفه d و مؤلفه q به صورتی تنظیم شوند تا با مینیمم جریان ممکن مقدار بیشینه گشتاور بدست آورده شود. این موضوع با یک کنترل آنلاین مؤلفه محور d جریان استاتور (Id) تحقق می یابد. در موتورهای مغناطیس دائم سطحی، MTPA برای ناحیه گشتاور ثابت (زیر سرعت پایه) بوسیله حفظ Id در مقدار صفر انجام می شود. بعلاوه با طرح کنترل Id=0، از مغناطیس زدایی آهنرباها اجتناب می شود.
در موتورهای مغناطیس دائم داخلی، هر دو مؤلفه محور d و محور q جریان استاتور در ایجاد گشتاور دخالت دارند. جریان Id که MTPA را در یک موتور مغناطیس دائم داخلی تأمین می کند، در ناحیه گشتاور ثابت منفی است و بر طبق شرایط گشتاور بار کنترل می شود.
در روش MTPA برای حالتی که سرعت دینامیکی موتور زیر سرعت پایه است، جریان مرجع محور d به کمک جریان مرجع محور q از رابطه زیر محاسبه و کنترل می شود:

که Ld و Lq اندوکتانس موتور در راستای محور d و q و λf شار مغناطیسی ناشی از آهنربای روتور است.
در بالای سرعت پایه یا ناحیه توان ثابت، ولتاژ استاتور باید در مقدار بیشینه خود (Vm) حفظ شود و شار تضعیف شود. برای این منظور می توان جریان مرجع محور d را بر اساس جریان مرجع محور q از رابطه زیر محاسبه و کنترل کرد:

که در این فرمول ωr سرعت دینامیکی، P تعداد جفت قطب و V′m مقدار ولتاژ فاز استاتور بیشینه با صرفنظر از افت ولتاژ مقاومت استاتور است. کنترل تضعیف شار بدین صورت نه فقط محدودیتهایی عملکردی درایو موتور را کاهش می دهد بلکه باعث می شود که تنظیم کننده جریان دچار اشباعی نشود که در سرعتهای بالا اتفاق می افتد. دامنه بیشینه ولتاژ فاز Vm که می تواند بدون اشباع تنظیم کننده جریان توسط اینورتر تأمین شود، تابعی از ولتاژ لینک DC است:

در ادامه این بحث برای درک بهتر عملکرد MTPA ، یک سیستم درایوی موتوری را طراحی کرده و سپس مورد شبیه سازی و تحلیل قرار می دهیم. برای بخش کنترلی ما از ادغام MTPA با روش FOC استفاده می کنیم. برای مطالعه و بررسی شبیه سازی FOC مربوط به موتور سنکرون مغناطیس دائم شما را به این پست ارجاع می دهیم.
شبیه سازی روش کنترلی MTPA-FOC
سیستم درایو شبیه سازی شده از موتور سنکرون مغناطیس دائم داخلی 6 قطبه با کنترل موردنظر در شکل 1 ارائه شده است. در این سیستم یک بار ثابت به موتور اعمال شده اما سرعت مرجع ثابت نیست و در زمان 0.5 ثانیه از 100 به 140 دور بر دقیقه افزایش می یابد. برای کاهش هارمونیک ها و همچنین نیاز به ولتاژ لینک DC کمتر، از روش SVPWM به جای SPWM مرسوم برای تحریک کلیدهای اینورتر تغذیه کننده موتور استفاده شده است. در این شبیه سازی هدف بررسی عملکرد سیستم درایو تحت تغییر سرعت است.
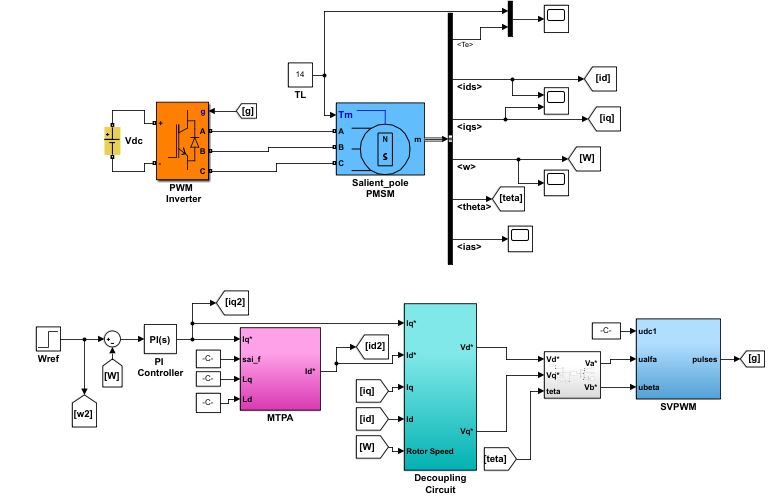
شکل 1) سیستم درایو موتور سنکرون مغناطیس دائم داخلی با کنترل MTPA-FOC
در ادامه مشخصه های مهم شبیه سازی ارائه شده است. در شکل 2 مشخصه سرعت دینامیکی و مقدار مرجع آن نشان داده شده که با بررسی آن مشخص است که سرعت دینامیکی به خوبی سرعت مرجع را دنبال می کند.
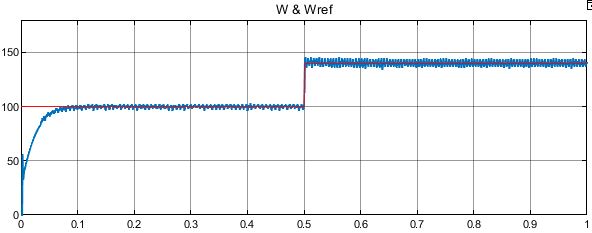
شکل 2) مشخصه سرعت دینامیکی و سرعت مرجع موتور
در شکل 3 مشخصه گشتاور دینامیکی و گشتاور بار موتور نمایش داده شده است. همانطور که مشخص است گشتاور دینامیکی نزدیک به گشتاور بار کنترل می شود و به غیر از نقطه ای که سرعت به یکباره افزایش می یابد، در بقیه نقاط ثابت و تثبیت شده باقی می ماند.
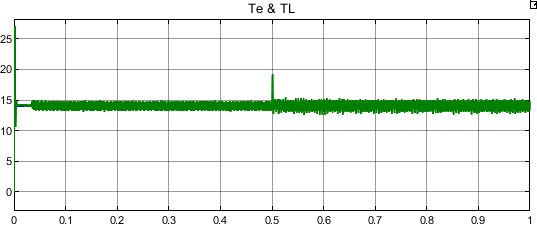
شکل 3) مشخصه گشتاور دینامیکی و گشتاور بار موتور
مشخصه جریان فاز A استاتور نیز در شکل 4 ارائه شده است. همانطور که مشخص است جریان سینوسی و دارای پیک 6.65 آمپر است.
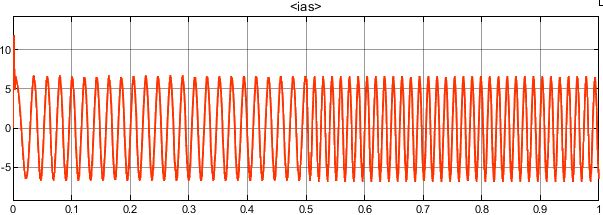
شکل 4) مشخصه جریان فاز A استاتور
نتیجه گیری:
با شبیه سازی روش MTPA-FOC برای سیستم درایو موتور سنکرون مغناطیس دائم داخلی و بررسی نتایج مشخص شد که عملکرد سیستم در کنترل موتور در هنگام تغییر سرعت مناسب است.
——————————————————————————————————————————————————–
توجه: برای بررسی جزئیات بیشتری از شبیه سازی و همچنین استفاده از آن در پروژه های درسی و پایان نامه می توانید فایل شبیه سازی شده از سیستم درایو موتور سنکرون مغناطیس دائم را در نرم افزار متلب 2020 به همراه تصاویری از خروجی های مهم شبیه سازی از لینک زیر خریداری نمائید.
