
موتورهای سوئیچ رلوکتانسی (SRMs) از نظر ساختاری جزء ساده ترین موتورهای الکتریکی محسوب می شوند. این گونه موتورها در کنار ساختار ساده دارای مزایایی هزینه ساخت و ساز کم، بازده زیاد، عملکرد سرعت متغیر و نسبت گشتاور به اینرسی بالا مورد می باشند. در این گونه موتورها هردوی استاتور و روتور دارای ساختار قطب برجسته بوده و با شکاف هوایی باریکی از هم جدا شده اند. برای تحریک موتور از سیم پیچی های متمرکزشده ای استفاده می شود که در استاتور قرار دارند و حول قطب های استاتور پیچیده شده اند. در این موتورها به دلیل تمایل روتور به همراستا شدن با موج شار تولیدی استاتور جهت حداکثرشدن شار تولیدی، به وجود هادی در روتور نیازی نیست، بنابراین تلفات مسی در روتور وجود ندارد و بازده موتور نسبت به موتورهایی مانند القایی بالاتر می باشد. در شکل 1 یک نمونه موتور سوئیچ رلوکتانسی 8 به 6 قطب چهار فازه نشان داده شده است.
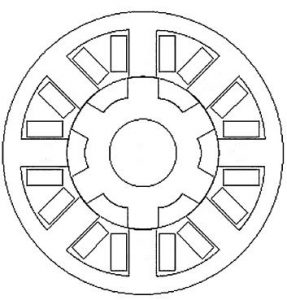
شکل 1) موتور سوئیچ رلوکتانسی چهار فاز
برای تحریک و کنترل مناسب سیم پیچی های موتور معمولاً از یک مبدل DC-DC خاص استفاده می شود که معمول ترین آن، مبدل پل نامتقارن می باشد. به دلیل اینکه جریان فازهای موتور معمولاً توسط کلیدهای حالت جامدی مانند IGBT یا MOSFET قطع و وصل می شود، فرآیند کنترل موتور سوئیچ رلوکتانسی کمی پیچیده است. مبدل نامتقارن، مبدلی است که دارای انعطاف پذیری زیادی در کنترل تحریک سیم پیچی های فاز موتور می باشد و توانایی کنترل مستقل فازها را دارد. این مبدل در شکل 2 نشان داده شده که برای یک موتور چهار فاز دارای چهار پایه می باشد، به طوریکه در هر پایه دو کلید و دو دیود قرار داده شده است. مدهای کاری مبدل به صورت، هدایت مستقیم، هدایت معکوس و هرزگردی می باشند که توسط ساختار کلید و دیودی موردنظر تحقق می یابند.
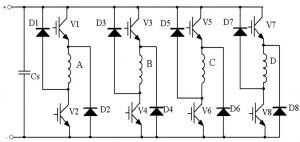
شکل 2) مبدل پل نامتفارن چهارفاز
در این قسمت شبیه سازی یک موتور سوئیچ رلوکتانسی چهار فاز با توان 4 کیلووات و سرعت نامی 1500 دور بر دقیقه ارائه شده است. سیستم درایو موردنظر به صورت کنترل حلقه با سرعت و کنترل هیسترزیس جریان تنظیم شده است که موتور را در کسری از ثانیه به سرعت و گشتاور نامی خود می رساند. برای تنظیم جداول داده این شبیه سازی از اطلاعات موجود در مشخصه گشتاور استاتیک و نمودار شار-جریان-زاویه استفاده شده که با شبیه سازی موتور فوق در محیط دوبعدی نرم افزار المان محدود ماکسول بدست آورده شده اند. در شکل 3 ساختار کلی سیستم درایو موردنظر در محیط سیمولینک متلب نشان داده شده است.
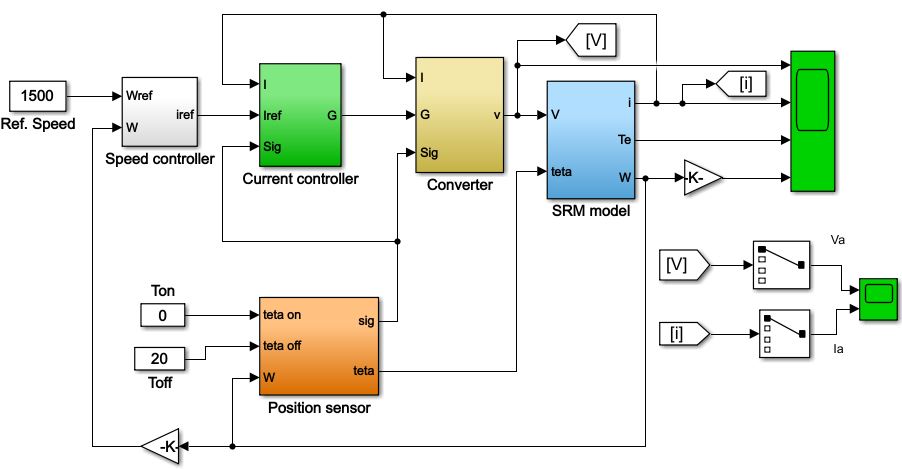
شکل 3) سیستم درایو موتور سوئیچ رلوکتانسی چهار فاز در سیمولینک متلب
در شکل 3 مدل موتور بر اساس جداول داده گشتاور-جریان-زاویه و شار-جریان-زاویه می باشد که این جداول با استفاده از اطلاعات بدست آمده از مشخصه های استاتیکی موتور در نرم افزار ماکسول تنظیم شده اند. در شکل 4 و 5 این مشخصه ها نمایش داده شده اند.
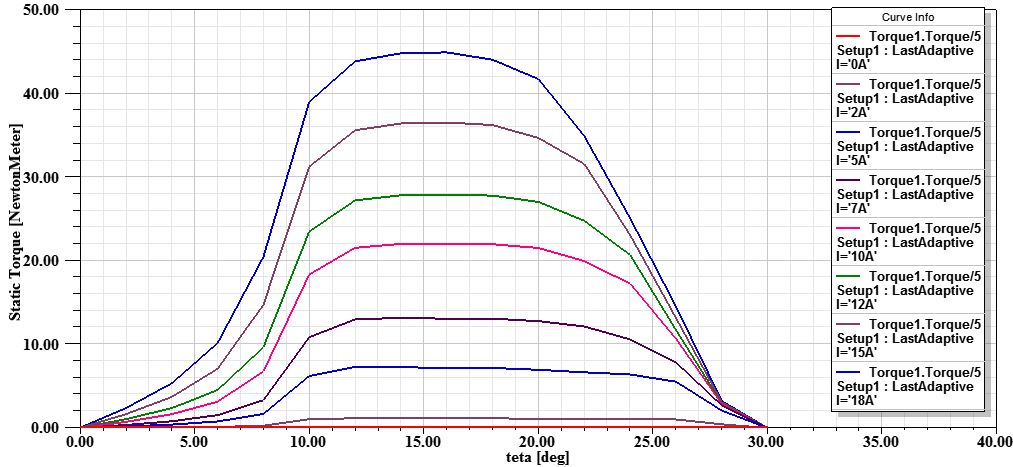
شکل 4) مشخصه گشتاور استاتیک بر حسب زاویه در جریان های مختلف
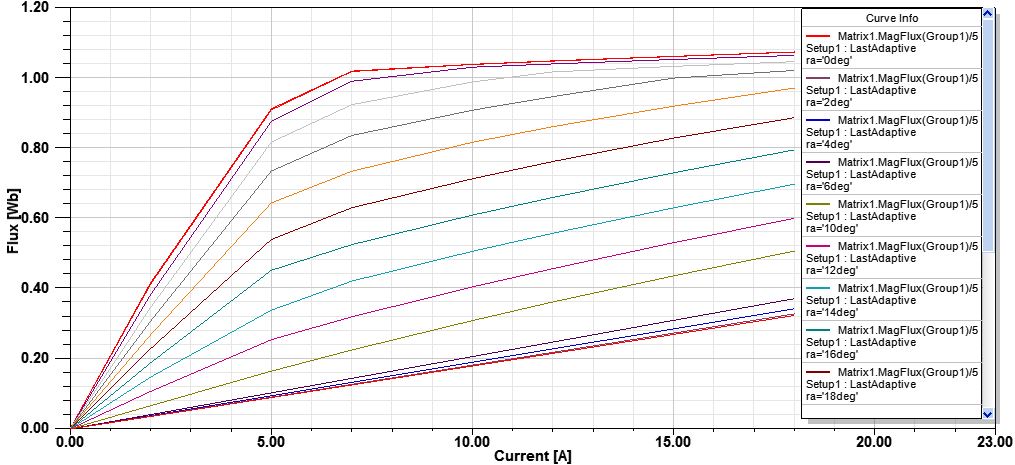
شکل 5) مشخصه شار – جریان در زاویه های مختلف
با شبیه سازی سیستم درایوموردنظر در حالت گسسته طی مدت زمان معین مشخصات آن بدست آورده می شود که در ادامه ارائه شده اند. توجه می کنیم که موتور به بار خطی متصل شده است.
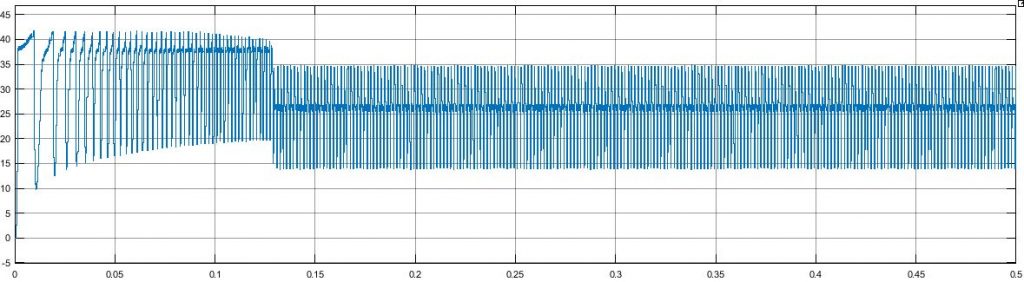
شکل 6) مشخصه گشتاور دینامیکی SRM
مقدار متوسط گشتاور حدود 25 نیوتن بر متر است که همان متوسط گشتاور نامی موتور می باشد.
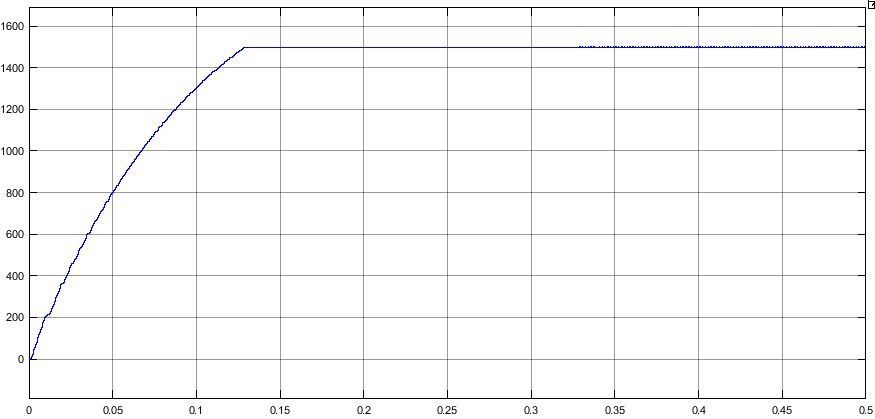
شکل 7) مشخصه سرعت SRM
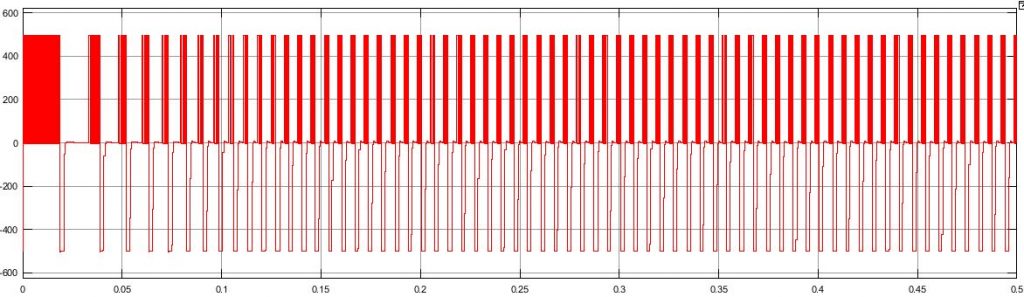
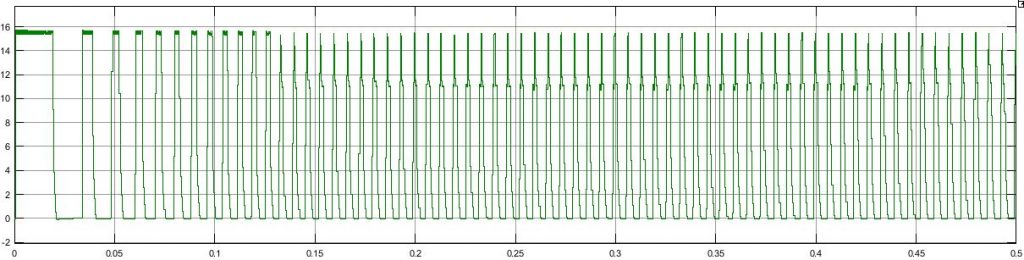
شکل 8) ولتاژ یک فاز موتور SRM
شکل 9) جریان یک فاز SRM
توجه: این پروژه دارای دو فایل می باشد که شامل شبیه سازی ساختار موتور سوئیچ رلوکتانسی در محیط المان محدود ماکسول و شبیه سازی سیستم درایو موتور در سیمولینک متلب می باشد. کاربران عزیز می توانند از فایل ماکسول در فرآیند بهبودسازی ساختار موتور سوئیچ رلوکتانسی استفاده کنند، ضمن اینکه شبیه سازی سیمولینک آن نیز برای اعمال انواع کنترل بر روی سیستم درایو موتور مناسب می باشد. برای خرید پروژه مذکور از لینک خرید استفاده کنید.
