
مقدمه:
برای اینکه بتوانیم فازهای موتور سوئیچ رلوکتانسی را به طور مناسب تحریک کنیم تا چرخش روتور ایجاد شود و به طور پیوسته ادامه داشته باشد، احتیاج به یک مبدل قدرت و مدار کنترلی داریم. یعنی نمی توان مستقیماً از طریق اعمال یک منبع DC و یا AC موتور را تحریک و درایو کرد. مدار کنترل، پسخورد جریان و موقعیت را برای تولید سیگنالهای کلیدزنی صحیح کنترل می کند و سپس فرمان مورد نظر را به قسمت مبدل قدرت می دهد و از آن طریق SRM را درایو می کند. طرح کلی از درایو SRM شامل موتور، مبدل قدرت و مدار کنترلی در شکل 1 آمده است.

شکل 1) سیستم درایو کلی موتور سوئیچ رلوکتانسی
برای تحریک موتور می توان از ساختارهای مبدلی مختلفی استفاده کرد که در مقالات پیشنهاد شده است. در این پروژه ما نوع تک کلیده با قابلیت مغناطیس زدایی بالا را در نظر گرفته و در مورد ساز و کار و نحوه عملکرد آن توضیحاتی ارائه داده ایم.
ساختمان یک مبدل قدرت درایو موتور SR:
یک مبدل قدرت درایو موتور SR به طور کلی از اجزای زیر تشکیل شده است:
یکسوکننده AC به DC، فیلترِ واسط، مبدل DC به DC .
کار یکسوکننده این است که ولتاژ ورودی AC را به ولتاژ DC موردنیاز تبدیل کند. بسته به کاربرد موردنظر ما، انواع مختلفی از یکسوکننده ها می تواند استفاده شود، مثلا ً برای کاربردهای توان بالا از یکسوکننده پل سه فاز استفاده می شود. از طرفی چون ولتاژ خروجی یکسوکننده یک ولتاژ DC مسطح نیست و ریپل دارد، باید از یک فیلتر برای مسطح کردن این ولتاژ استفاده کرد. این فیلتر میتواند از نوع C ، L و یا LC باشد، اما به طور معمول از یک فیلتر نوع C استفاده می شود. برای مهار ریپل ولتاژ و رساندن آن به یک مقدار قابل قبول، خازن باید بزرگ انتخاب شود. اگر این فیلتر (خازن) درست طراحی شود می تواند هارمونیهای مربوط به جریان ورودی یکسوکننده را مهار کند، ضمن اینکه برای ذخیره سازی انرژی برگشتی از سیم پیچی در مد مغناطیس زدایی نیز بکار می رود. کار مبدل DC به DC هم تبدیل ولتاژ DC ورودی ثابت به یک ولتاژ DC خروجی متغیر است. این مبدل می تواند ساختارهای مختلفی داشته باشد که در ادامه به آن پرداخته می شود. معمولاً خازن فیلتر به همراه مبدل DC به DC را مبدل موتور SR می نامند.
انواع مبدلهای موتورSRM :
مبدلهای قدرت موتور از نظر ساختار، عملکرد و تعداد اجزاء قدرت مورد استفاده به انواع مختلفی تقسیم می شوند، اما دو طبقه بندی کلی برای مبدلهای موتور SR می توان در نظر گرفت:
-
بر اساس تعداد کلیدها 2. بر اساس نوع کموتاسیون
طبقه بندی مبدلها بر اساس تعداد کلیدها به صورت شکل 2 است.
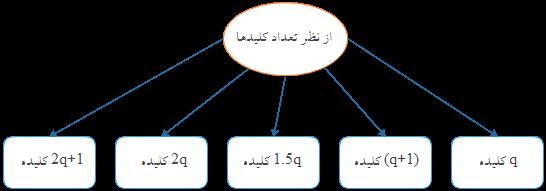
شکل 2) انواع مبدل از نظر تعداد کلید در هر فاز
از مبدلهای q کلیده می توان مبدل R دامپ و مبدل بایفلار را نام برد. مزیت این مبدلها در تعداد کمتر کلیدهای قدرت و دیود نسبت به انواع دیگر است. از مبدلهای (q+1) کلیده می توان به مبدل C دامپ و مبدل کلید مشترک (مبدل میلر) اشاره کرد. مبدل نامتقارن نیز که نسبت به ساختارهای دیگر بیشتر در مقالات مورد استفاده قرار گرفته، از مبدلهای 2q کلیده محسوب می شود. از مزیتهای این مبدل می توان به توانایی کنترل مستقل فازها از یکدیگر و مقادیر ولتاژ نامی نسبتاً پایین اجزای آن نام برد.
اما اگر مبدلها را بر اساس نوع کموتاسیون تقسیم بندی کنیم، این تقسیم بندی به شکل زیر خواهد بود:
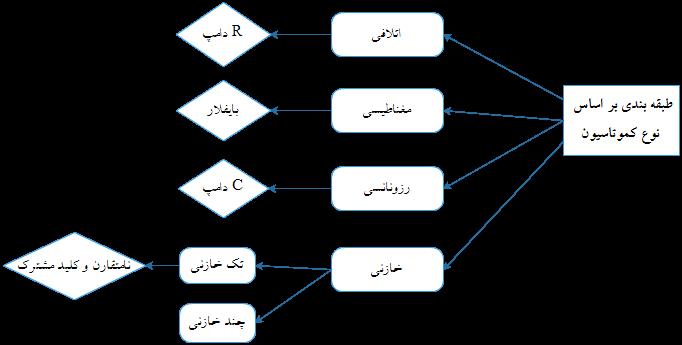
شکل 3) انواع مبدل از نظر نوع کموتاسیون
1.نوع اتلافی:
در این نوع مبدل، همه یا بخشی از انرژی مغناطیسی ذخیره شده با استفاده از مقاومت فاز، مقاومت خارجی یا هر دوی آنها تلف می شود. انرژی باقیمانده به انرژی مکانیکی تبدیل می شود. بنابراین هیچ انرژی مغناطیسی ذخیره شده ای در سیم پیچی فاز به خازن لینک DC یا منبع باز نمی گردد. مزیت این نوع مبدل در ساده بودن، هزینه پایین و تعداد کم اجزای نیمه هادی آن است.
2.مبدل مغناطیسی:
در این نوع، انرژی مغناطیسی ذخیره شده به یک سیم پیچی ثانویه که در تزویج با سیم پیچی فاز است، منتقل می شود. سپس این انرژی می تواند در خازن لینک DC ذخیره شود یا برای انرژی دهی فاز واردشونده استفاده شود. مزیت اصلی این مبدل پیکربندی ساده آن است. به هر حال، به علت حضور یک سیم پیچی ثانویه، وزن مس استفاده شده و هزینه موتور افزایش می یابد که یک عیب برای این نوع مبدل محسوب می شود. بعلاوه چگالی توان موتور برای این نوع مبدل از نوع های مرسوم پایینتر است.
3.مبدل روزنانسی:
این نوع دارای یک یا تعداد بیشتری اندوکتانس خارجی برای اهداف buck، boost و یا رزونانسی است. معمولاً سلف، دیود و کلید قدرت به عنوان مدار اسنابر طراحی می شوند. بنابراین ولتاژ دامپ به آسانی می تواند کنترل شود و افزایش سطح ولتاژ پایین آسان است. مزیت اصلی آن این است که ولتاژ سیم پیچی فاز میتواند بوسیله یک مدار اسنابر تنظیم شود. به هر حال وجود اندوکتانس و اجزاء اضافی دیگر اندازه و هزینه مبدل را افزایش می دهد.
4.مبدل خازنی:
در این نوع انرژی مغناطیسی مستقیماً به خازن بوست، خازن لینک DC یا هر دو تغذیه می شود. در مقایسه با نوعهای دیگر ذکر شده، یک جزء اضافی در مدار وجود دارد که در نتیجه تلفات مبدل را افزایش می دهد. بعلاوه، برخلاف مبدلهای دیگر، انرژی مغناطیسی ذخیره شده می تواند به آسانی با استفاده از فقط اندوکتانس سیم پیچی فاز بازخورد شود. اگرچه خازن یک مقاومت سری معادل دارد اما تلفات این مقاومت معادل، نسبت به مبدلهای دیگر پایین تر است. بنابراین مبدل خازنی برای استفاده در درایو موتور SR مؤثرتر است.
عملکرد مبدل تک کلیده جدید با مغناطیس زدایی سریع:
این مبدل تک کلیده از ساختارهای q کلیده و کموتاسیون نوع مغناطیسی است. نمایی از این مبدل برای یک موتور سه فاز 6/4 در شکل 4 نشان داده شده است. برای هر فاز ، یک کلید ترانزیستوری، دو دیود و یک سلف تزویج در مبدل تعبیه شده است. از کلید قدرت برای تحریک سیم پیچی موتور و از دیودها و سلف تزویج برای مغناطیس زدایی و انتقال انرژی سیم پیچی به منبع استفاده می شود. در واقع سلفی که سمت سیم پیچی اصلی فاز قرار گرفته در دوره کموتاسیون، موجب می شود که ولتاژ منفی بزرگی دو سر سیم پیچی اصلی فاز موتور قرار بگیرد، ضمن اینکه در دوره مغناطیس زدایی جریان سریعتر صفر می شود و سلفی که سمت منبع قرار گرفته است، برای برگرداندن انرژی مغناطیسی سیم پیچی فاز به منبع ورودی بکار می رود. در واقع این سلف مانند یک سیم پیچی کلمپ عمل می کند و انرژی القاگر مغناطیسی را به سمت منبع برمی گرداند. با تنظیم نسبت تعداد دورهای سلف تزویج یعنی a میتوان ولتاژ مغناطیس زدایی را برای هر مقدار مطلوب تنظیم کرد.
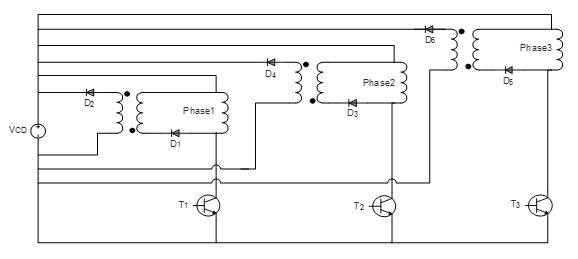
شکل 4) مبدل تک کلیده با قابلیت مغناطیس زدایی بالا برای موتور سوئیچ رلوکتانسی
از مزیتهای دیگر این مبدل این است که قابلیت کنترل مستقل جریان فاز را دارد و چون ولتاژ مغناطیس زدایی می تواند با نسبت a تنظیم شود، مبدل می تواند برای هر سرعت درایوی تنظیم شود. عیب این مبدل به خاطر استفاده از سلف تزویج و مدار اسنابر برای مهار ولتاژ گذاری بالای کلیدها در لحظه خاموشی است که هم فضایی جداگانه احتیاج دارد و هم هزینه مبدل را بالا می برد. قابلیت این مبدل بیشتر در سرعتهای بالا مشخص می شود که در این حالت سرعت کموتاسیون سریعتری نسبت به مبدلهایی دیگر مثل c دامپ و نامتقارن از خود نشان می دهد. این مبدل دو مد کاری دارد که در شکل 5 نشان داده شده است.
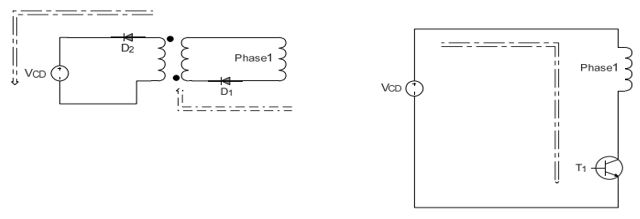
شکل 5) مدهای کاری مبدل تک کلیده، شکل سمت راست ( مد مغناطیسی شدن)، شکل سمت چپ ( مد مغناطیس زدایی)
شبیه سازی سیستم حلقه بسته کنترل سرعت با مبدل تک کلیده:
در این پروژه یک موتور سوئیچ رلوکتانسی چهار فاز 8/6 با توان 4 کیلووات و سرعت نامی 1500 دور بر دقیقه برای شبیه سازی در نظر گرفته شده است. قبل از تنظیم نقطه کار باید نوع کنترل (کنترل چاپینگ جریان یا کنترل تک پالس) را انتخاب کرد که در این پروژه در مدل حلقه بسته کنترل جریان به روش هیسترزیس انجام می شود. نقطه کار انتخاب شده برای بررسی عملکرد موتور سرعت 800 دور بر دقیقه با گشتاور نامی می باشد. همچنین بار موتور به صورت خطی در نظر گرفته شده است.
سیستمی که برای شبیه سازی در متلب در نظر گرفته شده در شکل 6 نمایش داده شده است. این سیستم دارای اجزای زیر می باشد:
1.سنسور موقعیت 2.کنترل کننده سرعت 3. کنترل کننده جریان 3. مبدل قدرت 4. بلوک مدل موتور
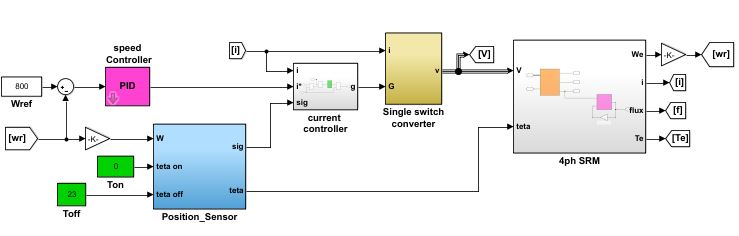
شکل 6) سیستم کنترل سرعت حلقه موتور سوئیچ رلوکتانسی با مبدل تک کلیده با خاصیت مغناطیس زدایی بالا
کار سنسور موقعیت در شبیه سازی این است که از فیدبک سرعت اطلاعات موقعیت را بدست آورده و با مقایسه با زوایای روشن و خاموشی، سیگنالهای مناسب را برای روشن و خاموشی کلیدهای قدرت مبدل فراهم کند. با توجه به نقاط کاری در نظر گرفته شده برای شبیه سازی، این زوایا ثابت هستند و تغییر داده نمی شوند.
کنترل کننده سرعت در این شبیه سازی از نوع PID انتخاب شده و وظیفه تنظیم سرعت و تولید جریان های مرجع را بر عهده دارد. کنترل کننده جریان نیز از نوع هیسترزیس طراحی شده که وظیفه تنظیم جریان و همچنین تولید سیگنالهای تحریک لازم برای کلیدهای مبدل تک کلیده را بر عهده دارد.
در ادامه نتایج مهم شبیه سازی ارائه شده است. در شکل 7 مشخصه گشتاور دینامیکی و سرعت نمایش داده شده است. در حالت ماندگار مقدار متوسط گشتاور 25.4 نیوتن بر متر و مقدار ریپل گشتاور حدود 32.5 درصد است. همچنین سرعت دینامیکی بدون بالازدگی در نمودار در زمانی حدود 0.056 ثانیه به مقدار ماندگار خود یعنی 800 دور بر دقیقه می رسد.
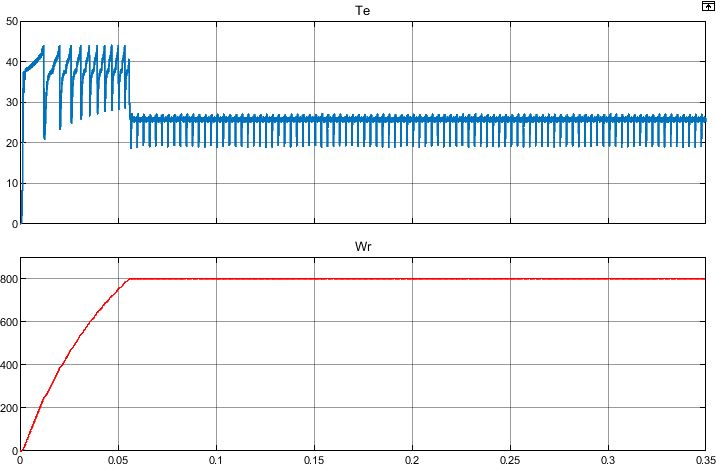
شکل 7) مشخصه های گشتاور حالت ماندگار و سرعت دینامیکی در مبدل تک کلیده

شکل 8) مشخصه های ولتاژ و جریان فاز A در حالت ماندگار
از شکل 8 نیز مشخص است که در حالت مغناطیس زدایی ولتاژ در حدود دو برابر ولتاژ DC ایجاد می شود تا جریان سریعتر صفر شود. این بر خلاف مبدل نامتقارن مرسوم است که در آن ولتاژ مغناطیس زدایی برابر با منفی ولتاژ DC می باشد.
با توجه به نتایج، مبدل تک کلیده می تواند عملکرد مطلوبی از موتور سوئیچ رلوکتانسی را ایجاد کند بنابراین می توان آن را یک جایگزین مناسب برای مبدل نامتقارن (که به طور مرسوم در سیستم درایو موتور سوئیچ رلوکتانسی استفاده می شود) در کاربردهای ولتاژ پایین و متوسط در نظر گرفت، ضمن اینکه هزینه تمام شده مبدل تک کلیده با توجه به مطالب بیان شده کمتر از مبدل نامتقارن خواهد بود.
————————————————————————————————————————————————————————-
توجه:
در این قسمت ما مبدل تک کلیده با خاصیت مغناطیس زدایی بالا را برای موتور سوئیچ رلوکتانسی چهار فاز معرفی کرده و در مورد نحوه عملکرد آن توضیحاتی ارائه دادیم. همچنین برای درک بهتر یک شبیه سازی حلقه بسته از موتور سوئیچ رلوکتانسی با مبدل فوق را ارائه کرده و تعدادی از نتایج آن را ارائه دادیم.
شما می توانید برای پروژه های درسی و پایان نامه خود از این شبیه سازی به عنوان یک شبیه سازی بیس استفاده کنید و همچنین عملکرد کلی موتور سوئیچ رلوکتانسی را به خوبی درک کنید. فایل این شبیه سازی در لینک زیر قابل خرید می باشد. همچنین یک گزارش کار 20 صفحه ای از این پروژه تنظیم شده که موارد توضیح داده شده در بالا بخشی از این گزارش می باشد، یعنی گزارش مذکور بسیار کامل تر و با جزئیات بیشتری می باشد. فایل این گزارش نیز بعد از خرید در اختیار شما قرار خواهد گرفت.
