
به طوری که خوب می دانیم کنترل یک موتور القایی مشکل تر از کنترل یک موتور جریان مستقیم (DC) است. با اینکه مدل ریاضی این موتور برای دهه ها شناخته شده بود، بعد از معرفی تکنیک کنترل برداری در دهه 70 بود که کنترل تحلیلی قدرتمند موتور القایی برای کاربردهای عملکرد – بالا محقق شد. بعد از آن در طول دهه 80 با پیشرفت تکنولوژی نیمه هادی (الکترونیک قدرت و دیجیتال)، پیاده سازی تکنیک کنترل برداری از نظر فنی و اقتصادی ممکن شد.
کنترل برداری موتور القایی (کنترل جهت دار میدان) یک تکنیک بسیار معروف است که در درایوهای متناوب عملکرد بالای پیشرفته استفاده می شود. این به این خاطر است که در روش مذکور، موتور القایی سه فاز مشابه با یک موتور جریان مستقیم شنت تحریک مستقل عمل می کند؛ در این حالت کنترل مستقل گشتاور و شار موتور القایی میسر می شود.
عملکرد مشابه با موتور جریان مستقیم می تواند با یک موتور القایی بدست آورده شود، اگر کنترل موتور در چهارچوب مرجع چرخشی سنکرون در نظر گرفته شود که در این حالت متغیرهای سینوسی به صورت کمیت های DC در حالت ماندگار ظاهر می شوند. این ایده بستگی به کنترل بردارهای فضایی جریان استاتور دارد اما پیچیده تر از روش استفاده شده برای ماشین DC می باشد. با استفاده از دو مؤلفه جریان استاتور، اگر iqs* فقط ids* را کنترل کرده و بر شار ψr اثر نگذارد، یعنی هر دوی بردارهای فضایی استاتور تحت تمام شرایط کاری از درایو کنترل شده برداری، عمود بر هم باشند،عملکرد مشابه با موتور DC حاصل می شود. بعلاوه کنترل برداری باید جهت یابی صحیح و کیفیت مطلوب جریانهای واقعی و مرجع را اطمینان ببخشد.
کنترل برداری موتور القایی (کنترل جهت دار میدان) می تواند به دو صورت مستقیم و غیر مستقیم انجام شود که توسط Blaschke (تحت نام DFOC) و Hasse (تحت نام IFOC) پیشنهاد شد. در روش کنترل جهت دار میدان غیر مستقیم، اندازه و زاویه شار معمولاً بوسیله ولتاژها و جریانهای ترمینال محاسبه می شود. در این حالت معمولاً دو کنترل کننده تناسبی – انتگرالی برای شار و سرعت استفاده می شود. از خروجی کنترل کننده شار می توان مقدار مرجع جریان در راستای محور d یعنی id* را محاسبه کرد، در حالیکه از خروجی کنترل کننده سرعت نیز می توان در نهایت به مقدار مرجع جریان در راستای محور q یعنی iq* دست یافت.
برای طراحی سیستم کنترل جهت دار میدان موتور القایی ابتدا لازم است که معادلات موتور در چهارچوب استاتور، روتور یا سنکرون شناخته شود. در ادامه معادلات ریاضی حاکم بر موتور در چهارچوب مرجع روتور ارائه شده است.
معادلات ولتاژ استاتور و روتور به صورت زیر می باشد:
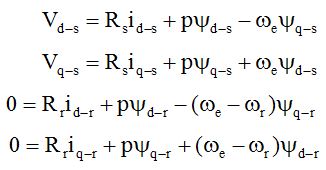
معادلات ولتاژ در چهارچوب مرجع روتور
در این روابط Rs و Rr به ترتیب مقاومت فاز استاتور و روتور، p عملگر مشتق گیر، ωr سرعت روتور، ωe سرعت سنکرون و ωe-ωr سرعت لغزش است. معادله گشتاور الکترومغناطیسی نیز به صورت زیر است:
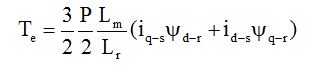
معادله گشتاور در چهارچوب مرجع روتور
که Lr و Lm به ترتیب اندوکتانس روتور و اندوکتانس متقابل و P تعداد قطبهای موتور است. جریانهای روتور در راستای محور d و محور q به صورت زیر است:
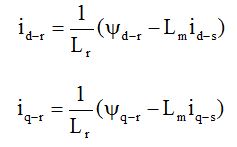
معادلات جریان روتور در چهارچوب مرجع روتور
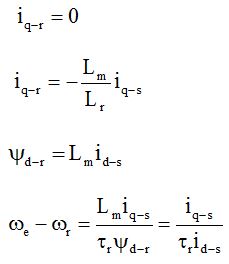
بعد از آشنایی با معادلات موتور حال به روش کنترل می پردازیم. اگر کنترل جهت دار میدان موتور القایی چنان باشد که شار روتور در راستای محور q مساوی با صفر و شار روتور در راستای محور d ثابت باشد، گشتاور الکترومغناطیسی فقط با جریان محور q استاتور کنترل خواهد شد و خواهیم داشت:

با جایگذاری معادلات اخیر در معادلات ریاضی حاکم بر موتور که ارائه شد، به روابط زیر می رسیم:
که τr ثابت زمانی مکانیکی روتور است که برابر با نسبت اندوکتانس روتور به مقاومت فاز روتور می باشد و به صورت زیر محاسبه می شود:

ثابت زمانی روتور
بدین ترتیب با کمک قواعد و روابط بیان شده می توان سیستم جهت دار میدان را برای کنترل موتور القایی پیاده سازی کرد. توجه می کنیم که عملکرد کنترل جهت دار میدان به تغییر پارامترهای موتور خصوصاً ثابت زمانی روتور حساس است. با برطرف کردن این مشکل، تعداد زیادی مکانیزم اندازه گیری و تخمین شار در مقالات پیشنهاد شده است. در روش اندازه گیری از سنسورهای هال استفاده می شود که معمولاً باعث از دست رفتن مقاومت پذیری مکانیکی و افزایش هزینه یا حجم موتور می شود. بنابراین تخمین شار روش مناسب تری نسبت به اندازه گیری مستقیم شار در تکنیک جهت یابی میدان می باشد. به هر حال، مسئله کلی، دقت تخمین و مقاومت تحت وقوع احتمالی نامعینی هاست.
باید دقت کرد که در روش کنترل جهت دار میدان، تخمین دامنه و فاز شار روتور برای پیاده سازی درست این روش بحرانی است. در روش مستقیم با سنس شار، عملکرد در سرعت های بسیار پایین غیردقیق می شود. این مشکل را می توان در روش غیرمستقیم حل کرد. در ادامه بلوک دیاگرام اساسی کنترل جهت دار میدان غیر مستقیم موتور القایی (IFOC) در شکل 1 نشان داده شده است.
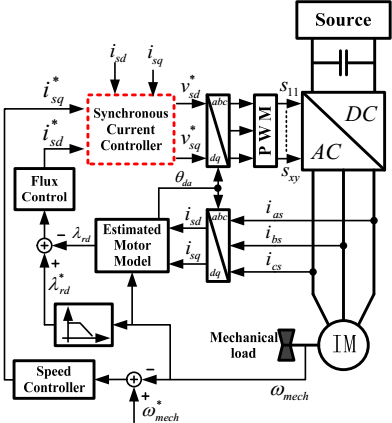
شکل 1) کنترل جهت دار میدان غیر مستقیم موتور القایی
هدف این طرح کنترلی به طور ریاضی وار، بدست آوردن یک بردار شار پیوندی روتور از یک موتور است که همانند شکل 2، هم ردیف شده با محور d چهارچوب چرخشی (چهارچوب سنکرون) باشد. این حالت مدلی را برای موتور الکتریکی ایجاد می کند که میتواند همانند یک موتور DC کنترل شود. طرح کنترلی بر اساس کنترل جریان سنکرون و یک موتور مجازی است که به طور عددی خروجی های مدل موتور را در چهارچوب سنکرون تخمین می زند. جریانهای سنکرون واقعی و از موتور سه فاز از طریق تبدیل چهارچوب مرجع بدست آورده می شوند که احتیاج به زاویه جابجایی شار پیوندی روتور در امتداد محور d دارد.
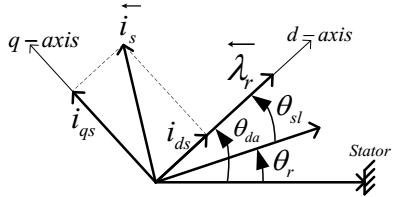
شکل 2) قاعده کنترل جهت یابی میدان
کنترل جریان سنکرون مرسوم:
در ادامه کنترل جریان مجزای یک موتور القایی سه فاز تغذیه شده با یک مبدل توان بررسی می شود. برای یک کنترل کننده جریان سنکرون مرسوم، موتورها فرض می شود که به طور مستقیم توسط شبکه تأمین توان شوند و یک مبدل توان استفاده نشود. بنابراین در چهارچوب سنکرون، مدل ریاضی وار یک موتور القایی می تواند به صورت ادامه در نظر گرفته شود:
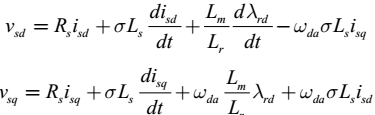
معادلات ولتاژ
معادله شار در راستای محور d
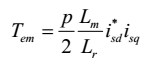
معادله گشتاور
برای معادلات 1 و 2، یک کنترل کننده جریان سنکرون با مجزاسازی با استفاده از فرامین ولتاژ به صورت زیر بدست می آید:
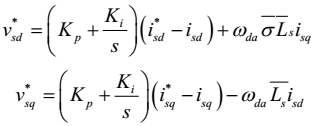
که `σ و `Ls مقدارهای تخمین زده شده σ و Ls هستند. بر اساس این معادلات، بلوک دیاگرامهای کنترل کننده PI مرسوم با ترم های جبران مجزا در چهارچوب سنکرون بدست می آید.
بررسی پروژه شبیه سازی
بعد از آشنایی مختصر با تکنیک کنترل جهت دار میدان، به سراغ شبیه سازی های انجام شده در متلب می رویم. در این قسمت دو مدل از کنترل جهت دار میدان غیر مستقیم در چهارچوب مرجع روتور در نظر گرفته شده، به صورتیکه در مدل اول از کنترل کننده هیسترزیس و در مدل دوم از مدولاسیون پهنای پالسی بردار فضایی (SVPWM) برای تولید پالسهای لازم جهت تحریک کلیدهای اینورتر سه فاز متصل به موتور القایی استفاده شده است. هدف این پروژه مقایسه ساختار و بلوک FOC در دو مدل و همچنین تفاوت مشخصه های خروجی موتور در دو حالت می باشد. در شکل 3 نمای کلی سیستم درایو و در شکل 4 اجزای تشکیل دهنده بلوک FOC در روش کنترل هیسترزیس جریان نشان داده شده است.
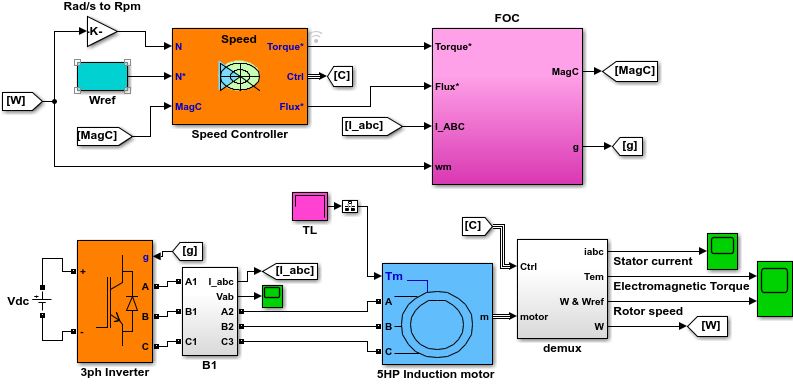
شکل 3) کنترل سیستم درایو موتور القایی به روش IFOC و تولید پالس تحریک به روش کنترل هیسترزیس جریان
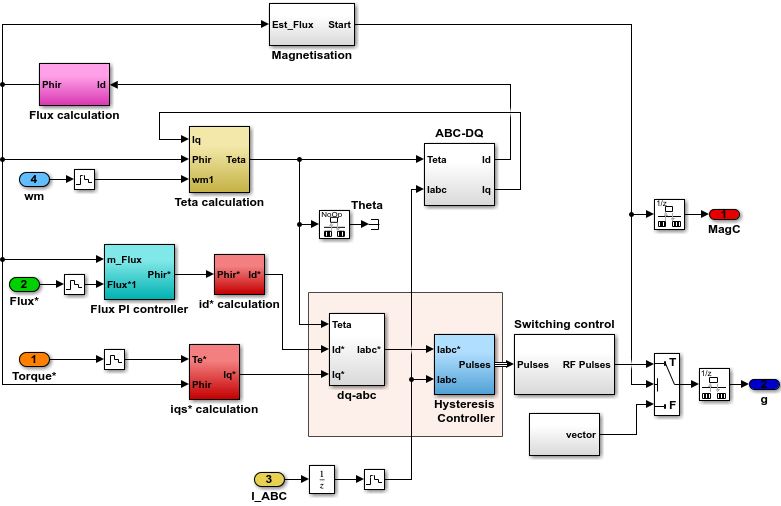
شکل 4) اجزای تشکیل دهنده بلوک IFOC در مدل اول
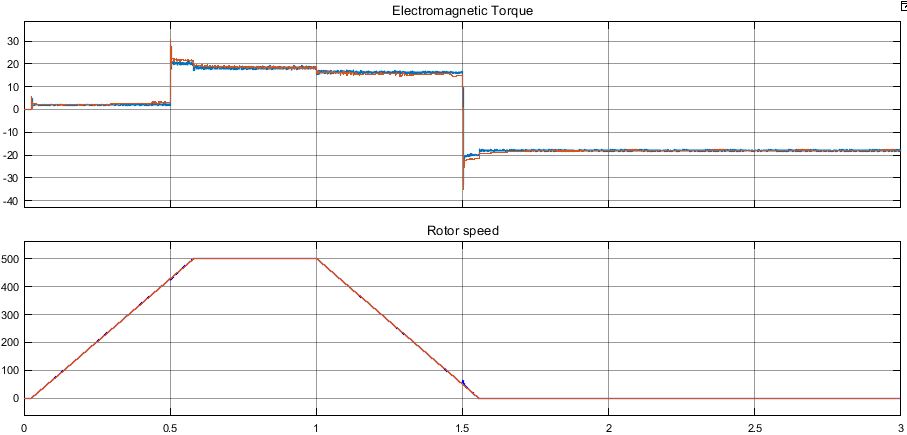
در ادامه نتایج مربوط به جریانهای سه فاز موتور و همچنین گشتاور و سرعت موتور در شکل های 5 و 6 ارائه شده است. همانطور که ملاحظه می شود جریانهای سه فاز حالت سینوسی خود را داشته و گشتاور و سرعت نیز مراجع خود را به خوبی دنبال می کنند.
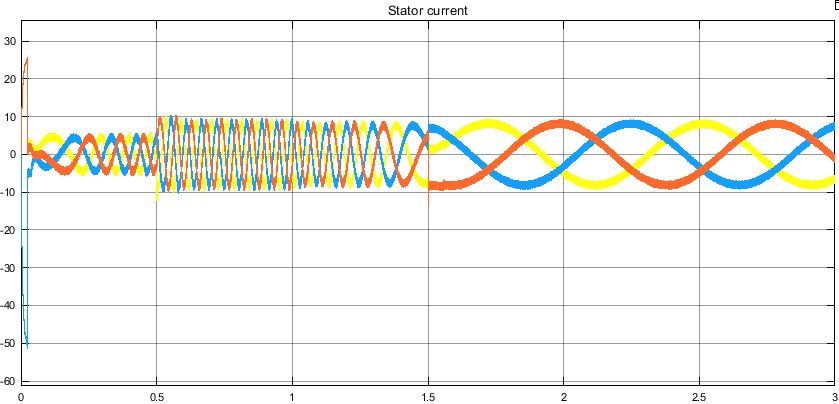
شکل 5) مشخصه جریان های سه فاز موتور القایی در مدل اول
شکل 6) مشخصه های گشتاور دینامیکی و سرعت موتور القایی در مدل اول
در ادامه در شکل 7 نمای کلی سیستم درایو و در شکل 8 اجزای تشکیل دهنده بلوک FOC در روش SVPWM نشان داده شده است.
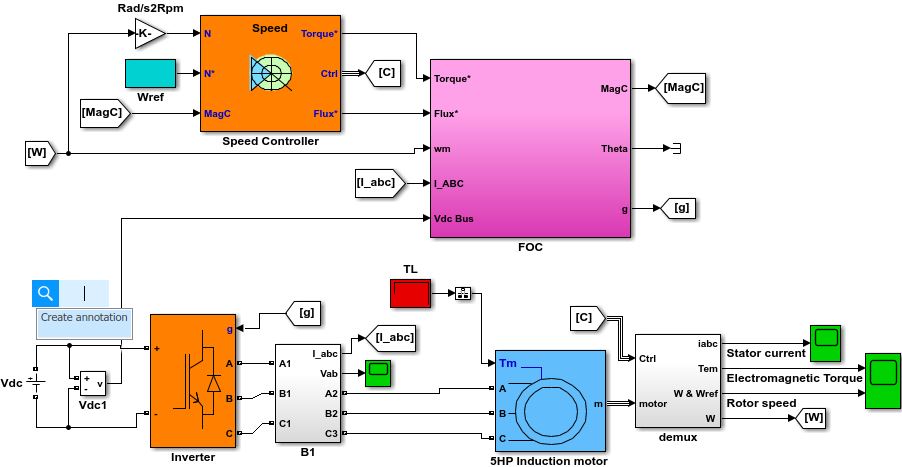
شکل 7) کنترل سیستم درایو موتور القایی به روش IFOC و تولید پالس تحریک به روش SVPWM
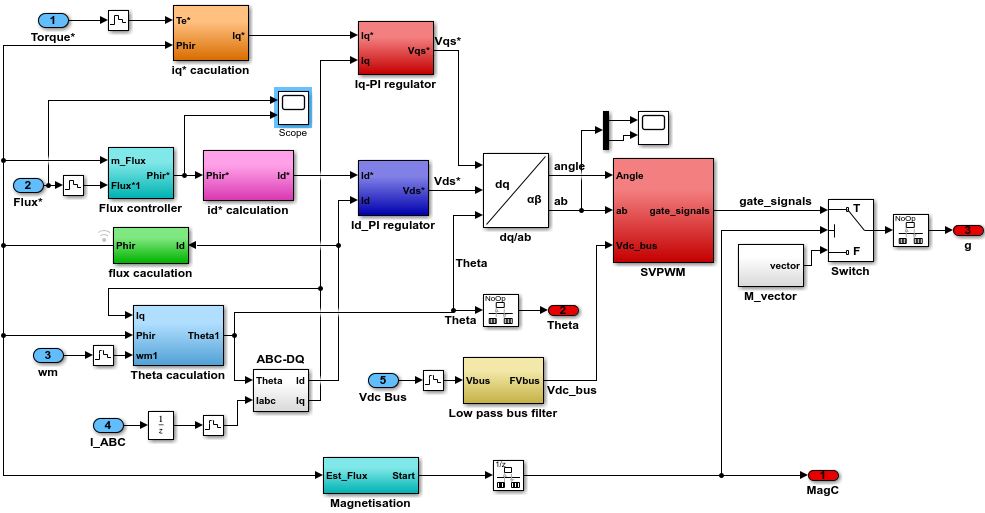
شکل 8) اجزای تشکیل دهنده بلوک IFOC در مدل دوم
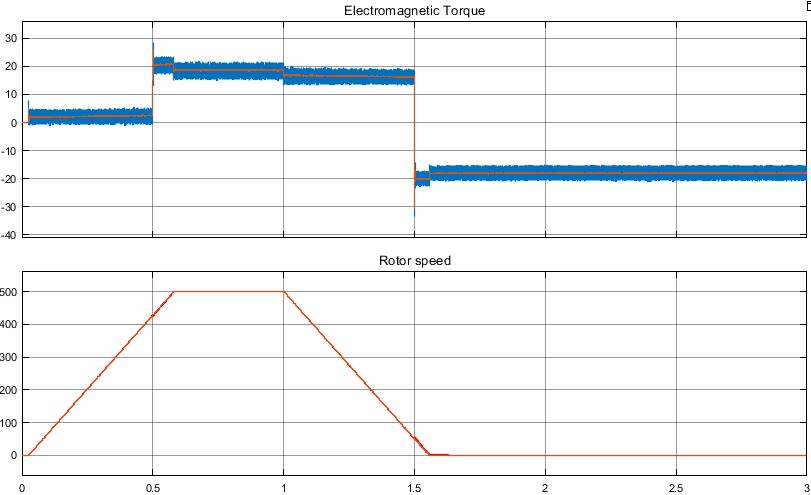
در ادامه نتایج مربوط به جریانهای سه فاز موتور و همچنین گشتاور و سرعت موتور در شکل های 9 و 10 ارائه شده است. همانطور که ملاحظه می شود همانند مدل اول، جریانهای سه فاز حالت سینوسی خود را داشته و گشتاور و سرعت نیز مراجع خود را به خوبی دنبال می کنند.
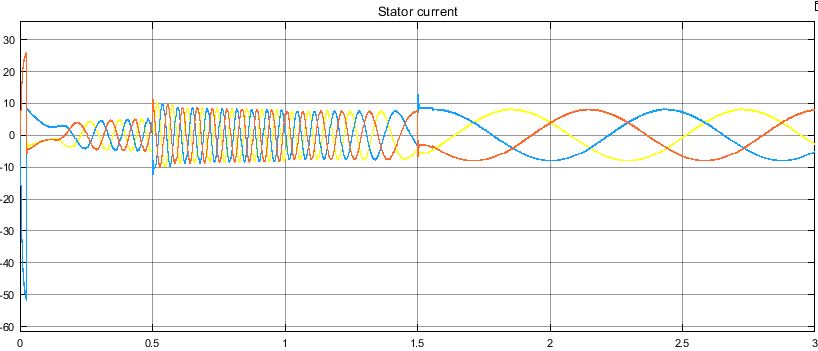
شکل 9) مشخصه جریانهای سه فاز موتور القایی در مدل دوم
شکل 10) مشخصه های گشتاور دینامیکی و سرعت موتور القایی در مدل دوم
از مقایسه نتایج دو شبیه سازی انجام شده به خوبی مشخص است که در مدل دوم نسبت به مدل اول ریپل های جریان های سه فاز و گشتاور دینامیکی موتور القایی به طور قابل توجه ای کاهش یافته است. بنابراین روش SVPWM در تکنیک FOC برای تولید پالس تحریک کلیدهای اینورتر بسیار بهتر از روش هیسترزیس جریان عمل می کند.
————————————————————————————————————————————–
مراجع استفاده شده:
* G. O. Garcia, R. M. Stephan and E. H. Watanabe, ” Comparing the Indirect Field-Oriented Control with a Scalar Method”, 1994
* M. Moallem, B. Mirzaeian, O. A. Mohammed and C. Lucas, ” Multi-Objective Genetic-Fuzzy Optimal Design of PI Controller in the Indirect Field Oriented Control of an Induction Motor”, 2001
* Rong-Jong Wai and Kuo-Min Lin, ” Robust Decoupled Control of Direct Field-Oriented Induction Motor Drive”,2005
* Amit Kumar and Tejavathu Ramesh, ” DIRECT FIELD ORIENTED CONTROL OF INDUCTION MOTOR DRIVE”, 2015
* D. L. Mon-Nzongo et al, ” Decoupling Network of Field-Oriented Control in Variable-Frequency Drives”, 2017
* A. Sivakumar and N.B. Muthu Selvan, ” Reduction of source current harmonics in ANN controlled induction motor”, 2018
———————————————————————————
توجه: دوستان عزیز، برای دریافت شبیه سازی های انجام شده در مورد کنترل جهت دار میدان غیر مستقیم موتور القایی می توانید از لینک خرید استفاده کنید. در صورت نیاز به فیلم آموزشی، لطفا از قسمت تماس با ما استفاده کرده و برای ما پیام بفرستید.
—————————————————————————————————————————————
مزایای پروژه حاضر:
1) آشنایی با ساختار و روش کنترل جهت دار میدان غیر مستقیم موتور القایی
2) پیاده سازی دقیق روش کنترل جهت دار میدان غیر مستقیم در محیط سیمولینک متلب با نتایج رضایت بخش و مناسب
3) مقایسه عملکرد دو متد مختلف برای کنترل جهت دار میدان غیر مستقیم موتور القایی در قالب شبیه سازی
4) استفاده از شبیه سازی انجام شده برای مقایسه با روش های کنترلی دیگر کنترل مد لغزشی، کنترل منطق فازی، کنترل پیش بین و …
