
مقدمه:
ماشین های رلوکتانسی سنکرون دارای چندین مزیت نسبت به موتورهای القایی هستند از جمله بازده بالاتر ،چگالی گشتاور بیشتر و دمای روتوری پایین تر. همچنین نسبت به موتورهای سنکرون مغناطیس دائم احتیاجی به آهنرباهای دائم ندارد، بنابراین انتظار میرود که هزینه ساخت و ساز کمتری داشته باشد. از طرفی مسائل مربوط به محدودیت دمایی روتور و مغناطیس زدایی آهنرباها در آنها وجود ندارد و دارای رفتار تحمل خطای بهتری می باشند. در بعضی از کاربردها مثل کاربردهای کششی و صنعتی، آنها جایگزین مؤثری برای موتورهای القایی و حتی موتورهای سنکرون مغناطیس دائم می باشند.
به هر حال این ماشین ها دارای عیبهای معینی مثل گشتاور خروجی پایینتر نسبت به نوع موتور مغناطیس دائم داخلی هستند چون دارای گشتاور آهنربایی نمی باشند. عیب دیگر مشخصه گشتاور با ریپل افزایش یافته است که بعلت ساختار خاص روتور می باشد.
معمولاً برای افزایش گشتاور ساختار چند حصاره پیشنهاد می شود در حالیکه برای کاهش ریپل گشتاور، شکل و ابعاد حصارها مورد بهینه سازی قرار می گیرد. در این پست قصد داریم با معرفی راهکار جدید ،ریپل گشتاور را در یک ساختار نمونه از موتور رلوکتانسی سنکرون با ساختار حصار شار ذوزنقه ای شکل کاهش دهیم.
ساختار روتور
فرآیند طراحی در ماشین های رلوکتانسی سنکرون بیشتر بر روی ساختار روتوری آنها متمرکز است. پیکربندی های مختلفی با درنظر گرفتن تعداد حصارها، شکل حصارها و اندازه ابعاد آنها می تواند طراحی شود. ما قبلا در این پست ضمن آشنایی با ساختار، عملکرد و پارامترهای مهم مربوط به این نوع از موتور، اشاره ای به ساختارهایی با حصار شار مستطیلی (منظم) و حصار شار دایره ای کردیم. در شکل 1 نمونه ای از یک موتور رلوکتانسی سنکرون با ساختار حصار شار مستطیلی 4تایی نمایش داده شده است. معمولاً ساختارهایی با حصار شار مستطیلی موجب ریپل گشتاور کمتری می شوند.
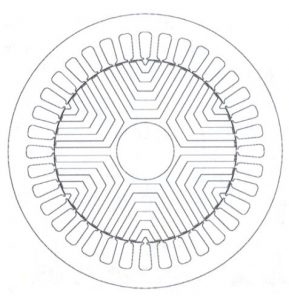
شکل 1) موتور رلوکتانسی سنکرون با حصارهای شار مستطیلی
در مقایسه با ماشین های القایی با اندازه مشابه، طراحی روتور در این ماشین ها با دقت ناکافی می تواند به آسانی منجر به تولید ماشین های با متوسط گشتاور معقول اما با ریپل گشتاور غیرقابل قبول شود. مسئله ریپل گشتاور به دفعات زیاد در طراحی این گونه از ماشین مورد توجه قرار گرفته و راهکارهای زیادی در مقالات برای آن پیشنهاد شده است. معمولترین و پرکاربردی ترین روش پیشنهادی تغییر و اصلاح حصارهای شار در روتور می باشد.
در طراحی ساختارهای حصار شار مستطیلی، معمولاً پارامترهای زیر در روتور مورد ارزیابی و بهینه سازی قرار می گیرد:
1)پهنای حصارهای شار در راستای محور ربعی (Wlk)
2)پهنای حصارهای شار در کناره ها (WId)
3)پهنای حمل کننده های شار (Si)
این موارد در شکل 2 نمایش داده شده است. همچنین موارد دیگر مثل شکل انتهایی حصارهای شار و تعداد و نحوه قرارگیری پل ها در حصار می تواند بر مشخصات موتور اثرگذار باشد.
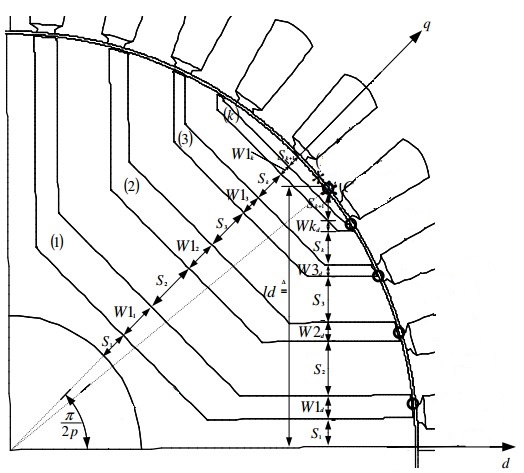
شکل 2) پارامترهای مهم در بهینه سازی ساختار روتور
طرح پیشنهادی برای روتور موتور رلوکتانسی سنکرون
ساختار روتوری که در اینجا در نظر گرفته شده، ساختاری است که از تغییر جزئی حصار شار مستطیلی مرسوم بدست می آید. این ساختار، «حصار شار ذوزنقه ای با انتهای حصار گرد» نامیده می باشد که برای تمام حصارها طول کمان انتهایی حصار برابر است. در شکل 3 ساختار روتور چهار حصاره موتور رلوکتانسی سنکرون با شکل ذوزنقه ای نمایش داده شده است.
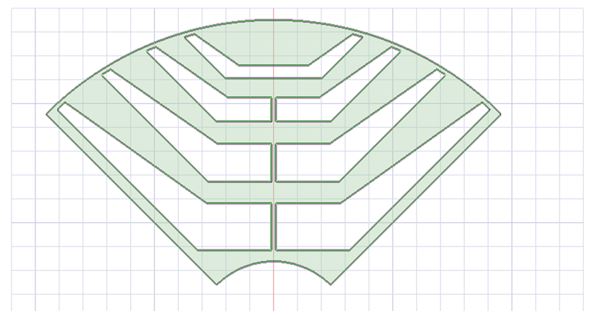
شکل 3) ساختار روتور چهار حصاره ذورنقه ای شکل برای موتور رلوکتانسی سنکرون
اما فرآیندی که برای کاهش ریپل گشتاور در این ساختار انتخاب شده، شامل تغییر ارتفاع و شکل سر دندانه استاتور می باشد. برای کاهش تأثیر متقابل حصارهای روتور و دندانه های استاتور می توان ارتفاع سر دندانه را مطابق با شکل 4 به گونه ای تغییر داد که عرض سر دندانه در کناره آن، نسبت به مرکز آن کوتاه تر باشد. با آنالیز پارامتری ارتفاع کاهش یافته در سر دندانه میتوان بهینه ترین حالت را برای مشخصه های خروجی موتور بدست آورد.
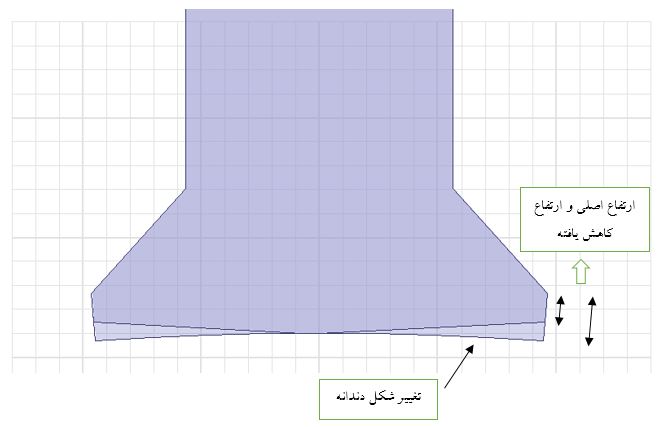
شکل (4) تغییر ارتفاع و شکل سر دندانه نمونه در استاتور موتور رلوکتانسی سنکرون
توجه می کنیم که کاهش ارتفاع سر دندانه تا حدی ممکن است و در این کار باید به مسائلی مثل اشباع سر دندانه استاتور و مشکلات ساخت و ساز آن نیز توجه خاصی بشود.
شبیه سازی و نتایج
محیطی که برای شبیه سازی موتور رلوکتانسی سنکرون در نظر گرفته شده، محیط دوبعدی نرم افزار ماکسول می باشد که محیطی مناسب برای تحلیل المان محدود ساختار ماشینهای الکتریکی است. ابتدا مشخصه های مدل اصلی را بدون تغییر در دندانه های استاتور بررسی می کنیم.
در شکل 5، شکل موج گشتاور خروجی مدل اولیه به نمایش در آمده است. با توجه به اندازه گیری های انجام شده مقدار متوسط گشتاور 38.53 نیوتن متر و میزان ریپل گشتاور با توجه به پیک تو پیک گشتاور در حالت ماندگار که 11.086 است، برابر28.77 درصد می باشد.
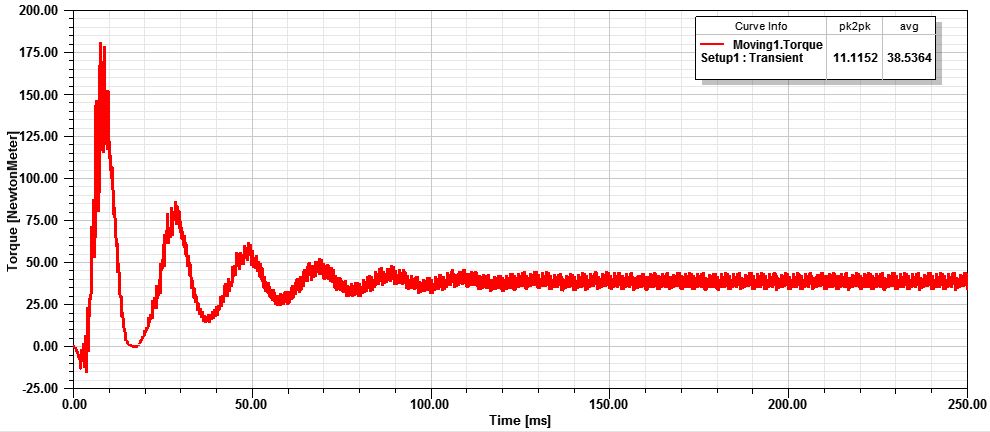
شکل (5) مشخصه گشتاور مدل اولیه
در شکل 6 شکل موج جریان مدل اولیه نمایش داده شده که دارای مقدار مؤثر 13.2 آمپر می باشد و به شکل سینوسی نزدیک است.
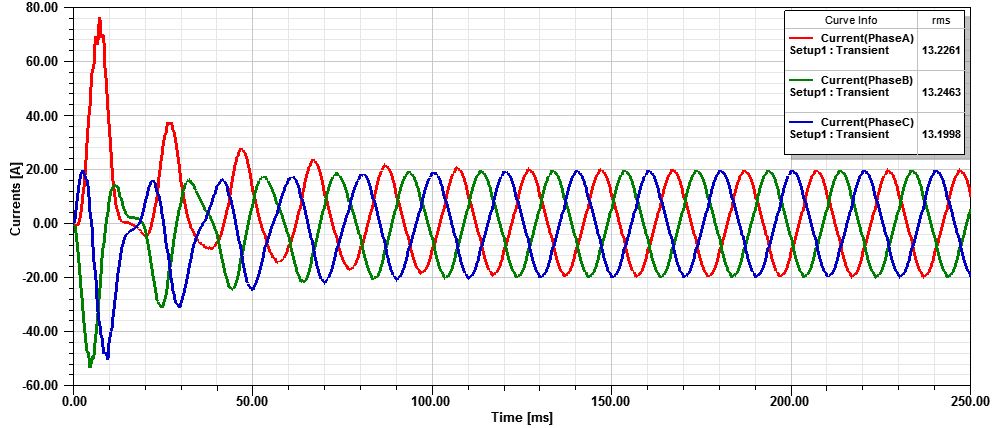
شکل 6) مشخصه جریان های سه فاز خروجی مدل اولیه
حال به سراغ تغییر در دندانه استاتور می رویم و سعی می کنیم با تحلیل پارامتری و فرآیند بهبودسازی، حالت بهینه را بیایم. تغییر در دندانه به معنای تغییر در کناره های آن است که قبلا در شکل 4 مشخص شده بود. با این کار سر دندانه در کناره باریکتر شده در حالیکه در مرکز بدون تغییر می ماند. بازه تغییرات برای ارتفاع سر دندانه استاتور را به صورت [ 0.8 – 0.5] در نظر می گیریم. این بازه که با روش سعی و خطا تعیین شده، بازه مناسبی برای آنالیز می باشد. با آزمایشهای مختلف میتوان اثر تغییر ارتفاع را بر روی مشخصه های خروجی مشخص کرد و در انتها بهترین مدل را به عنوان مدل بهینه نهایی انتخاب کرد. تعدادی از نتایج مربوط به تحلیل موتور در مرحله دوم در جدول (1) نمایش داده شده است. همان طور که ملاحظه می شود، مدل 3 در میان مدلهای دیگر دارای کمترین مقدار ریپل گشتاور است.
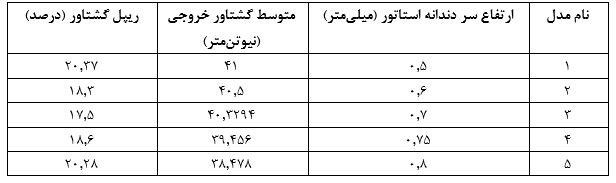
جدول (1) تعدادی از نتایج تحلیل پارامتری مرحله دوم شبیه سازی
نمایی ربعی از مدل موتور با ساختار روتور و استاتور اصلاح شده که به عنوان مدل بهینه نهایی در نظر گرفته شده است، در شکل 7 نشان داده شده است.
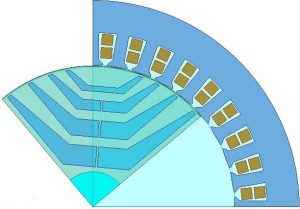
شکل 7) نمایی ربعی از موتور سنکرون رلوکتانسی بهینه شده نهایی
همچنین در شکل 8 نمایی نزدیک تر از دندانه های استاتور نمایش داده شده است.
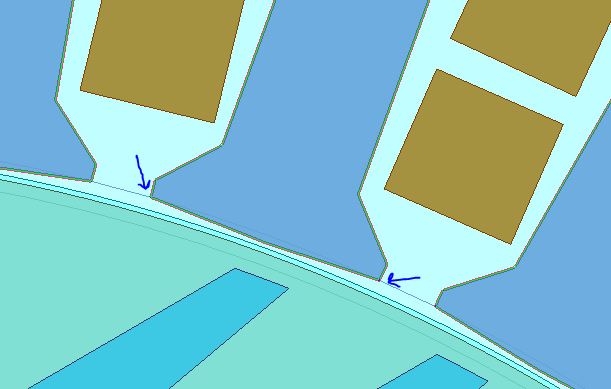
شکل 8) دندانه های استاتور تغییر یافته در مدل بهینه
نتایج مربوط به آنالیز موتور با روتور بهینه نهایی در شکلهای 9 ، 10 و 11 نمایش داده شده است. با توجه به شکل 9، متوسط گشتاور برابر با 40.31 نیوتن متر و میزان ریپل گشتاور با توجه به مقدار پیک تو پیک 6.48 برابر با 16.08 درصد می باشد. این میزان ریپل به اندازه 12.69 درصد از مدل اولیه کمتر است.
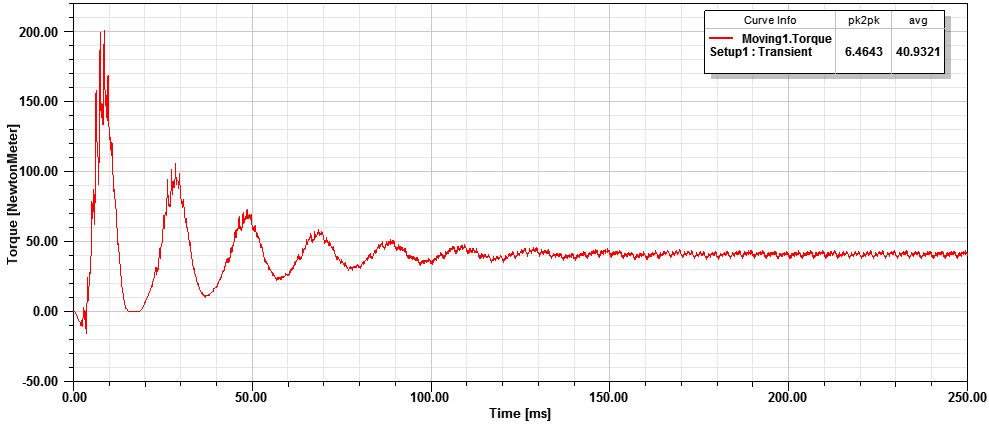
شکل (9) مشخصه گشتاور مدل بهینه شده نهایی
در شکل 10 مقدار مؤثر جریان برابر با 14.2 آمپر و شکل موج تقریباً سینوسی است. این میزان جریان از جریان مؤثر مدل اولیه بیشتر می باشد.
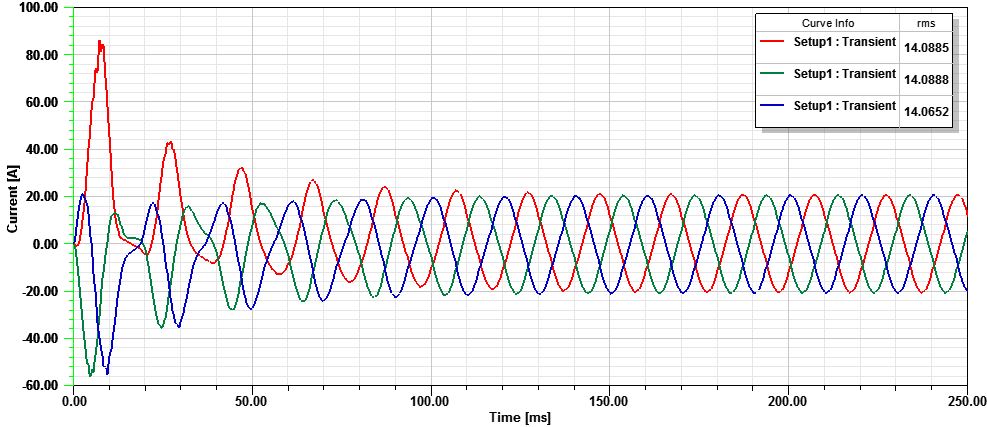
شکل (10) شکل موج جریان های سه فاز خروجی مدل بهینه شده نهایی
برای مشاهده سطح چگالی شار در استاتور و روتور موتور سنکرون رلوکتانسی، می توان از تحلیل میدان در لحظه های مختلف در محیط دوبعدی استفاده کرد. در شکل 11 برای یک لحظه نمونه، سطح چگالی شار در موتور به نمایش در آمده است. همان طور که مشخص است، سطح چگالی شار در استاتور و روتور در حد مجاز می باشد و این به خاطر طراحی مناسب و در نظر گرفتن سطح اشباع ماده هسته در محاسبات اولیه طراحی است، به صورتیکه باید به مقدار مجاز چگالی شار در یوخه استاتور و روتور و دندانه استاتور توجه کافی بشود.
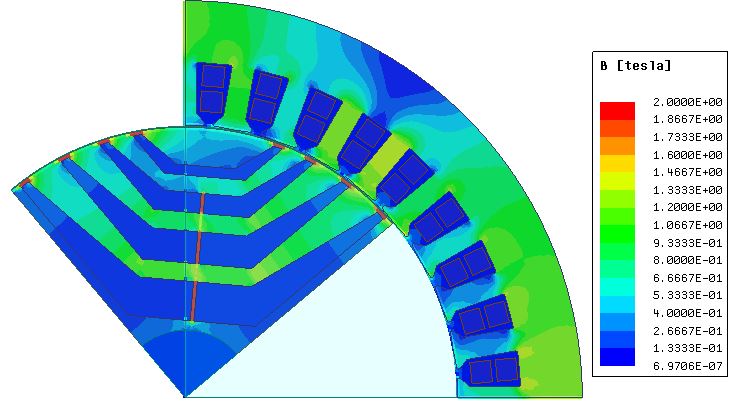
شکل (11) سطح چگالی شار در استاتور و روتور در مدل بهینه شده نهایی در لحظه 0.23 ثانیه
محاسبه بازده موتور بهینه:
بازده موتور سنکرون رلوکتانسی را برای موتور بهینه نهایی بدست آورد. بازده موتور را می توان از رابطه زیر بدست آورد:

که در این رابطه T متوسط گشتاور خروجی بر حسب نیوتن – متر، ωn سرعت بر حسب رادیان بر ثانبه، Pcs تلفات هسته استاتور، Pcr تلفات هسته روتور و Pcu تلفات مسی سیم پیچی استاتور می باشد. مقدارهای موردنیاز در جدول 2 نشان داده شده است.
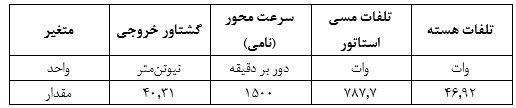
جدول (2) متغیرهای موردنیاز برای محاسبه بازده
با قرار دادن مقدارهای فوق در رابطه بازده مقدار بازده حدود 88.35 درصد بدست می آید.
نتیجه گیری:
موتورهای رلوکتانسی سنکرون دارای عیبهایی مثل ضریب توان پایین و ریپل گشتاور نسبتا بالا هستند. مسئله ریپل گشتاور خصوصا در کاربردهایی که عملکرد همواری از موتور نیاز است، دارای اهمیت بیشتری است. به همین خاطر باید از روش کنترل مؤثر سیستم درایو یا طراحی بهینه ساختار، سعی شود که ریپل گشتاور کاهش داده شود.
در این پروژه یک موتور رلوکتانسی سنکرون چهار حصاره با شکل حصار ذوزنقه ای مورد تجزیه و تحلیل قرار گرفته و برای بهبود عملکرد آن راهکار تغییر در لبه های دندانه استاتور پیشنهاد شد. از نتایج بدست آمده از تحلیل المان محدود در نرم افزار ماکسول مشخص شد که راهکار مذکور می تواند ضمن افزایش جزئی متوسط گشتاور، موجب کاهش قابل ملاحظه ریپل گشتاور شود.
—————————————————————————————————
توجه
برای در اختیار داشتن فایلهای شبیه سازی و همچنین گزارش کار 11 صفحه ای پروژه می توانید از لینک خرید زیر استفاده کنید.
