
مقدمه
امروزه ماشینهای مغناطیس دائم درایو مستقیم یکی از فعال ترین موضوعات تحقیقاتی در مورد ماشینهای الکتریکی شده اند؛ علت آن توسعه سریع کاربردهای درایو مستقیم مانند رباتیک، حمل و نقل الکتریکی و توان بادی می باشد.
ماشینهای ورنیر مغناطیس دائم که دارای چگالی گشتاور بالا و ریپل گشتاور پایین هستند، برای کاربردهای درایو مستقیم سرعت پایین کاندید بالقوه و مناسبی می باشند. تاکنون پیکربندی های مختلفی از این نوع ماشین مانند تک استاتور – تک روتور، دو استاتوره و دو روتوره پیشنهاد شده است. نوع تک استاتور – تک روتور که نوع مرسوم و اولیه توسعه داده شده است، می تواند به دو صورت روتور داخلی و روتور خارجی طراحی شود. نوع روتور خارجی از آن دارای مزایایی چون متوسط گشتاور و توان خروجی بیشتر در حجم مشابه نسبت به نوع روتور داخلی می باشد. در تحقیقات انجام شده بر روی نوع مرسوم در سالهای اخیر مواردی مثل تغییر نوع آرایش آهنربایی، درنظرگرفتن آهنرباها در هر دوی استاتور و روتور، تغییر شکل دندانه های استاتور و … جهت بهبود مشخصات موتور مورد بررسی قرار گرفته است.
در این پروژه، ساختار یک موتور ورنیر مغناطیس دائم روتور خارجی با دندانه های استاتور ترکیبی در نظر گرفته شده و بهبود مشخصات خروجی آن چون متوسط گشتاور و توان خروجی هدف قرار گرفته است. برای این منظور اثر تغییر پهنای یوخه استاتور و پهنای دندانه مستقیم ساده در استاتور مورد بررسی قرار گرفته است. در اینجا ضمن ارائه توضیحاتی در مورد موتور ورنیر و همچنین نوع مغناطیس دائم تک استاتور – تک روتوره از آن، به بررسی مراحل بهینه سازی و سپس شبیه سازی پرداخته و تعدادی از نتایج مهم را ارائه خواهیم داد.
ماشین ورنیر مغناطیس دائم
مفهوم ماشین ورنیر اولین بار در سال 1963 در شکل ورنیر رلوکتانسی توسط آقای لی پیشنهاد شد که دارای ساختار دوبل برجسته در استاتور و روتور بوده و از سیم پیچی آرمیچر توزیع شده در استاتور بهره می برد. این ساختار به علت مسائلی مانند ضریب توان پایین مورد استقبال قرار نگرفت. با توسعه ماشینهای مغناطیس دائم و بهبود عملکرد مواد آهنربایی، ماشین جدیدی بنام ورنیر مغناطیس دائم (PMVM) شد. توسط آقای آشیزاکی در سال 1995 طراحی و ارائه شد که علاوه بر استاتور و روتور برجسته دارای آهنرباهای دائم تعبیه شده در شیارهای روتور بود. این ساختار اولیه برای کاربرد گشتاور هموار زیاد در سرعت پایین پیشنهاد شد. بعد از آن محققان توجه خیلی بیشتری را به این نوع موتور معطوف کردند و ساختارهای مختلفی برای آن پیشنهاد شد. در یک دسته بندی کلی می توان این ساختارها را به صورت شکل 1 تقسیم بندی کرد:
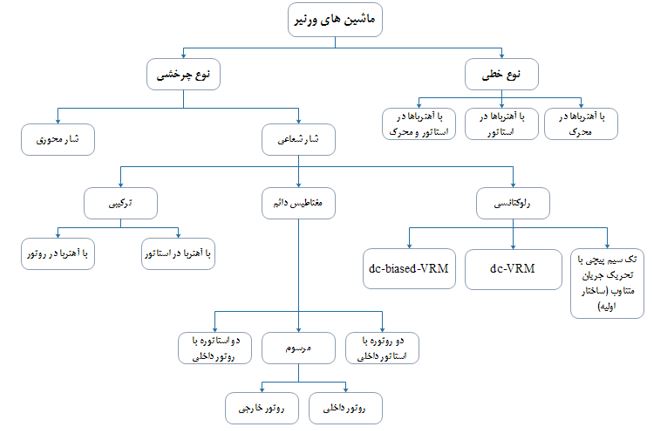
شکل 1) انواع ساختارهای موتور ورنیر
در ماشین های چرخشی ورنیر مغناطیس دائم، برخلاف ماشین های سنکرون مغناطیس دائم تعداد جفت قطب سیم پیچی استاتور با آهنرباهای روتور برابر نیست، بلکه تعداد جفت قطب سیم پیچی استاتور کمتر از آهنرباهای روتور است. پیکربندی ماشین ورنیر بستگی به قاعده عملکردی خاصی بنام «اثر گیربکس مغناطیسی» دارد که باعث می شود که ماشین، میدان هارمونیکی سرعت بالای مخصوصی تولید کند. از این رو، استاتور می تواند طراحی میدان گردان سرعت بالا را با جفت قطب سیم پیچی و تعداد شیار پایین ممکن سازد، در حالیکه روتور هنوز عملکرد سرعت پایین خود را حفظ کند. در این حالت مؤلفه اساسی و هارمونیکی میدان مغناطیسی شکاف هوایی می تواند مشترکاً در انتقال گشتاور برای بدست آوردن یک ظرفیت گشتاور بالا در ماشین ورنیر شرکت داده شود. این ماشینها با داشتن ظرفیت گشتاور و بازده زیاد برای کاربردهای درایو مستقیم سرعت پایین چون ژنراتور توان بادی و موتور چرخشی برای خودروهای الکتریکی مناسب هستند.
در شاخه مربوط به ساختارهای مغناطیس دائم چرخشی با سه نوع پیکربندی مرسوم مواجه هستیم:
ساختارهای تک استاتوره و تک روتوره
ساختارهای دوبل استاتور
ساختارهای دوبل روتور
نوعی که ابتدا پیشنهاد شد، دسته اول بود که خود به دو دسته روتور داخلی و روتور خارجی تقسیم می شوند. نوع روتور خارجی نسبت به نوع روتور داخلی می تواند در ابعاد مشابه چگالی گشتاور بیشتری را تولید کند، به همین سبب برای یک سطح توان مشخص، می توان ابعاد موتور را با پیکربندی روتور خارجی نسبت به روتور داخلی کاهش داده و در هزینه ساخت و ساز صرفه جویی کرد. در این پروژه تمرکز ما بر ساختار روتور خارجی می باشد.
قاعده کلی عملکرد
موتور ورنیر یک موتور الکتریکی است که بر اساس قاعده ورنیر عمل می کند. ویژگی خاص این نوع موتور آن است که جابجایی کوچک در روتور، یک جابحایی بزرگ محور ماکزیمم و مینیمم پرمانس مغناطیسی را ایجاد می کند. زمانی که یک میدان مغناطیسی چرخشی (ناشی از تحریک سیم پیچی های فاز استاتور) در شکاف هوایی ایجاد می شود، روتور به طور آهسته در کسری از سرعت میدان گردشی می چرخد. زمانی که سرعت موتور از سرعت میدان چرخشی پایین می رود، گشتاور موتور افزایش می یابد. بنابراین موتور ورنیر براساس قاعده یک گیربکس مغناطیسی کار می کند. این نوع موتور در کاربردهایی که سرعت پایین و گشتاور زیاد مطلوب است، جذاب و کارا می باشد. چونکه این نوع از موتور یک ماشین سنکرون است، گشتاور مفید آن فقط زمانی که ماشین در سرعت سنکرون کار می کند، توسعه می یابد.
ساختار تک استاتوره و تک روتوره با روتور خارجی
در ساختارهای روتور خارجی برخلاف روتور داخلی، روتور در بیرون از استاتور قرار دارد که باعث افزایش قطر شکاف هوایی می شود. در این حالت ساختار روتور خارجی دارای دو مزیت مهم می باشد:
الف) افزایش فضای مربوط به شیار استاتور برای قراردادن سیم های سیم پیچی آرمیچر استاتور: امکان طراحی سیم هایی با سطح مقطع بزرگتر و مقاومت کمتر وجود دارد که منجر به کاهش تلفات مسی خواهد شد.
ب) در حجم یکسان، موتور با روتور خارجی دارای ظرفیت گشتاور و توان بیشتری نسبت به نوع روتور داخلی می باشد، بنابراین امکان طراحی موتور با ابعاد کوچکتر وجود دارد که موجب کاهش هزینه ساخت و ساز خواهد شد.
نمونه اولیه از ساختار ماشین ورنیر مغناطیس دائم روتور خارجی برای تسخیر توان بادی در حالت درایو مستقیم با سرعت پایین پیشنهاد شد. ساختار مذکور که در شکل 2 نشان داده شده است، علاوه بر دارابودن مزیت های نوع روتور خارجی دارای مزیت مهمتری بوده و آن قطبهای شار مدولاسیون (FMPs) است.
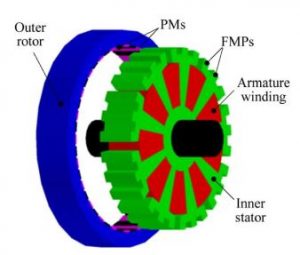
شکل 2) موتور ورنیر مغناطیس دائم روتور بیرونی با دندانه های استاتوری تقسیم شده و روتور قطب – منظم
اصطلاح قطب شار مدولاسیون به حالتی از ساختار استاتور گفته می شود که در آن بجای استفاده از دندانه های مستقیم و معمول، دندانه های تقسیم شده بکار می رود. دندانه های تقسیم شده حالتی مشابه با قطعه های فولادی ساکن در گیربکس های مغناطیسی هم محور بوجود می آورد که می تواند به طور مؤثر میدان چرخشی سرعت بالای سیم پیچی آرمیچر و میدان چرخشی سرعت پایین آهنربای روتور خارجی را مدوله کند. بنابراین ساختار مذکور مزیتهای هردوی ساختار روتور خارجی و گیربکس مغناطیسی را یکجا در خود دارد.
آهنرباهای دائم در این ساختار روی سطح داخلی روتور بیرونی قرار گرفته و نسبت به ساختار روتور داخلی از استحکام مکانیکی بهتری برخوردار هستند. آرایش آهنرباها در این ساختار به صورت قطب – منظم ( که به صورت یک در میان جهت های مغناطیسی شدگی آنها عوض می شود) تنظیم شده و جهت مغناطیس شدگی آنها شعاعی می باشد. ذکر این نکته مهم است که استفاده از سیم پیچی متمرکزشده در استاتور ضمن کاهش تلفات مسی و هزینه ساخت نسبت به نوع توزیع شده، در ساختار روتور خارجی باعث بهبود تهویه هوایی و اتلاف گرمایی بهتر می شود.
در این نوع موتور رابطه بین تعداد جفت قطب آهنربا دائم روتور (Pr)، تعداد جفت قطب سیم پیچی آرمیچر ( Ps) و تعداد قطبهای شار مدولاسیون ( Ns) به صورت زیر تعریف می شود:

بنابراین نسبت گیربکسی سرعت بالا به پایین برابر است با:

که m=1,3,.. و k=0,+1,-1,+2,-2,… می باشد.
مزیت مهم این ساختار در نسبت به گیربکس مغناطیسی به صورت ساده تر بودن آن بیان شده که علت آن استفاده از یک شکاف هوایی در موتور پیشنهادی بجای سه شکاف هوایی در گیربکس می باشد.
ساختار دیگری مشابه با ساختار شکل 2 وجود دارد که در آن استاتور به صورت مدولاور (دندانه تقسیم شده) بوده در حالیکه آرایش آهنرباهای روتور بجای حالت منظم، دارای حالت قطب ترتیبی می باشد. در این ساختار که در شکل 3 نشان داده شده است، روتور شیاردار بوده و درون شیارهای آن آهنرباهای دائم قرار داده شده اند که همگی دارای جهت های مغناطیس شوندگی یکسانی می باشند.

شکل 3) موتور ورنیر مغناطیس دائم روتور خارجی با دندانه های استاتوری تقسیم شده و روتور قطب – ترتیبی
مزیتهای ساختار پیشنهاد شده را می توان به صورت موارد زیر ذکر کرد:
الف) کاهش تعداد آهنرباها بعلت استفاده از ساختار قطب – ترتیبی نسبت به ساختار قطب – منظم
ب) افزایش چگالی گشتاور بعلت ایجاد گشتاور رلوکتانسی توسط ساختار قطب – ترتیبی روتور
ج) کاهش شار حاشیه ای و در نتیجه افزایش شار پیوندی بعلت ساختار قطب – ترتیبی نسبت به ساختار قطب- منظم
د) حذف نامتعادلی مغناطیسی ایجاد شده توسط آرایش قطب – ترتیبی روتور بوسیله ساختار مدولار استاتور
ه) ساختار استاتور موجود، دوره تناوب گشتاور دندانه ای را نصف می کند و مقدار آن را خصوصاً زمانی که آرایش قطب – ترتیبی روتور استفاده شود، کاهش می دهد.
بعد از آشنایی با دو ساختار اولیه پیشنهاد شده از موتور ورنیر مغناطیس دائم تک استاتوره – تک روتور خارجی، به سراغ موتور شبیه سازی شده در این پروژه می رویم و شبیه سازی و بهینه سازی آن را انجام خواهیم داد.
ساختار مورد بررسی
ساختاری که در این پروژه مورد بررسی و ارزیابی قرار گرفته در شکل 4 نمایش داده شده است. این موتور از نوع ورنیر مغناطیس دائم روتور خارجی بوده و دارای دندانه ترکیبی در استاتور است که ابعاد و مشخصات اولیه آن از مرجع [1] انتخاب شده است. با داشتن پنج فاز در استاتور، این موتور دارای سرعت نامی 600 دور بر دقیقه و جریان نامی 10 آمپر می باشد.
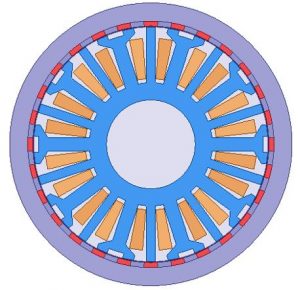
شکل 4) موتور ورنیر مغناطیس دائم روتور خارجی با دندانه ترکیبی در استاتور
در ساختار فوق همانطور که ملاحظه می شود، آهنرباهای موتور به صورت محیطی و با آرایش قطب – منظم روی سطح داخلی روتور توزیع شده اند. از طرفی دندانه های استاتور در این مدل، با موتورهای معمول متفاوت می باشد، چنانکه به صورت یکی در میان، دندانه ها به شکل تقسیم شده و دندانه مستقیم ساده کنار هم قرار گرفته اند (دندانه ترکیبی).
مراحل شبیه سازی موتور ورنیر مغناطیس دائم
در این قسمت موتور ورنیر مغناطیس دائم موردنظر در محیط دوبعدی نرم افزار انسیس ماکسول مورد شبیه سازی و تحلیل قرار می گیرد. برای تحریک سیم پیچی فازهای استاتور، از تحریک جریان استفاده شده و موتور در سرعت نامی و در حالت بدون بار مورد بررسی قرار می گیرد. ابتدا مدل با ابعاد پیشفرض طراحی شده و با تحلیل گذرا در محیط المان محدود، مشخصات اولیه آن چون متوسط گشتاور، نیروی ضدمحرکه برگشتی (back-EMF) ، جریان و … بدست آورده می شود.
سپس در مرحله دوم فرآیند بهبودسازی مشخصات خروجی موتور در دستور کار قرار می گیرد. این فرآیند به صورت سه مرحله ای انجام شده و در هر مرحله نتایج مربوط به متوسط گشتاور،ریپل گشتاور و تلفات هسته بدست می آید. هدف اصلی بدست آوردن متوسط گشتاور دینامیکی بیشینه است. فرآیند بهینه سازی موردنظر به صورت خلاصه وار به صورت زیر است:
الف) تأثیر تغییر پهنای یوخه استاتور بر متوسط گشتاور و رپیل گشتاور
ب) تأثیر تغییر پهنای دندانه مستقیم ساده بر متوسط گشتاور و ریپل گشتاور
ج) تأثیر تغییر هر دو عامل پهنای یوخه استاتور و پهنای دندانه مستقیم ساده بر متوسط گشتاور و رپیل گشتاور
توجه می کنیم که به دلیل محدودیت های شیار استاتور و ضریب پرشدگی شیار، تغییرات هر یک از دو عامل مورد بررسی باید در بازه ای مشخص انجام شود. به همین منظور برای پهنای یوخه استاتور بازه تغییر (8-10) میلیمتر و برای پهنای دندانه مستقیم ساده، بازه تغییر (4.37-5.1) میلیمتر در نظر گرفته شده است.
شبیه سازی موتور با ابعاد اولیه
در این مرحله مقدار پیشفرض و اولیه در نظر گرفته شده برای پهنای یوخه استاتور 8 میلیمتر و برای پهنای دندانه ساده مستقیم 4.37 میلیمتر می باشد. شبیه سازی را با این مقادیر انجام داده و نتایج را بدست می آوریم.
با توجه به شکلهای 5 و 6، مقدار متوسط گشتاور در جریان مؤثر 11 آمپر برابر با 61.31 نیوتن بر متر و مقدار ریپل گشتاور با توجه به پیک تو پیک 3.8 نیوتن بر متر، برابر با 6.2 درصد می باشد.
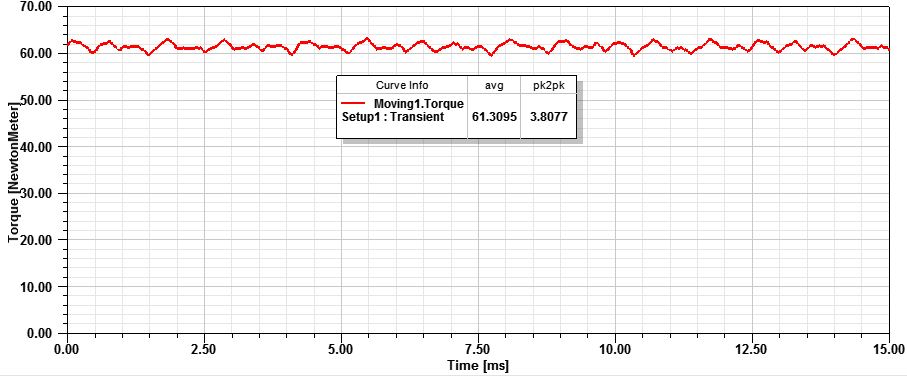
شکل 5) نمودار گشتاور خروجی موتور با ابعاد اولیه
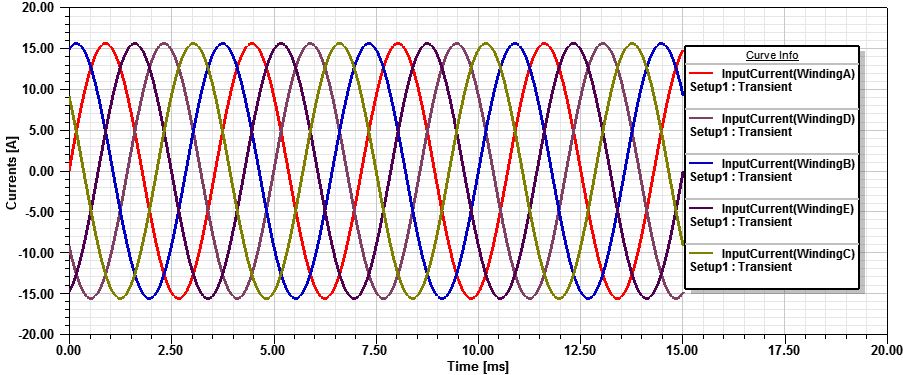
شکل6) نمودار جریان های فازهای موتور با ابعاد اولیه
با توجه به شکل 7 مقدار مؤثر back-EMF فاز A موتور در حالت بی باری در سرعت نامی 600 دور بر دقیقه، حدود 195.43 ولت می باشد.
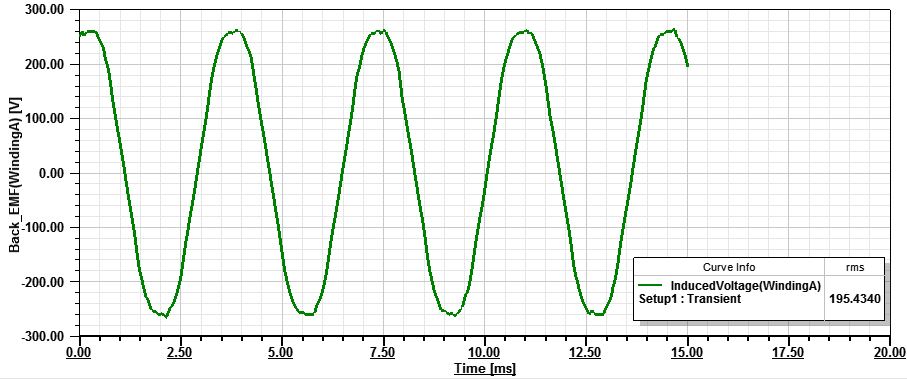
شکل 7) نمودار back-EMF موتور با ابعاد اولیه
شبیه سازی موتور بهینه سازی شده
حال به بهینه سازی ساختار اولیه می پردازیم و اثرات تغییر در پهنای یوخه استاتور و دندانه مستقیم ساده را بررسی می کنیم. این کار در سه مرحله و با تحلیل پارامتری انجام می شود. به دلیل حجم بالای مطالب از ذکر جزئیات بهینه سازی و مشخصات خروجی در اینجا خودداری می کنیم (روند موردنظر و نتایج کامل این مرحله در گزارش کار پروژه آورده شده است.)
با توجه به نتایج کلی بدست آمده و اینکه هدف اصلی بهبودسازی مشخصات خروجی، بدست آوردن بیشینه متوسط گشتاور است، ابعاد بهینه برای پهنای یوخه استاتور و پهنای دندانه مستقیم ساده به ترتیب برابر با 10 میلیمتر و 4.736 میلیمتر بدست می آید.
با توجه به شکلهای 8 و 9، مقدار متوسط گشتاور در جریان مؤثر 11 آمپر برابر با 62.86 نیوتن بر متر و مقدار ریپل گشتاور با توجه به پیک تو پیک 3.68 نیوتن بر متر، برابر با 5.85 درصد می باشد.
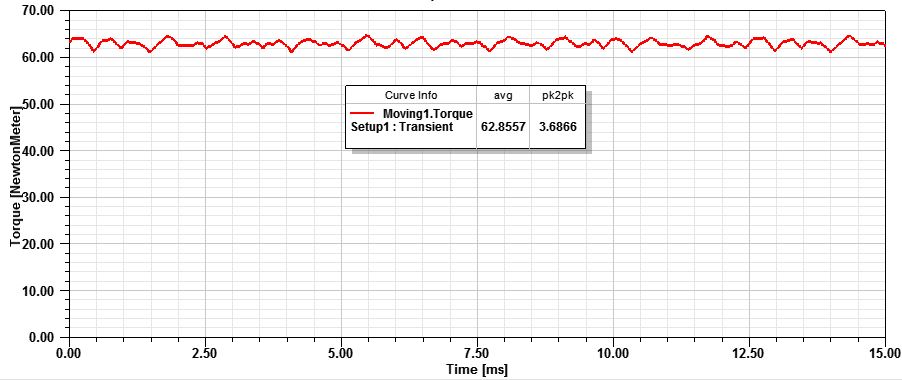
شکل 8) نمودار گشتاور خروجی موتور ورنیر مغناطیس دائم با ابعاد بهینه

شکل9) نمودار جریان های فازهای موتور با ابعاد بهینه
با توجه به شکل 10 مقدار مؤثر back-EMF فاز A موتور در حالت بی باری در سرعت نامی 600 دور بر دقیقه، حدود 201.5 ولت می باشد.
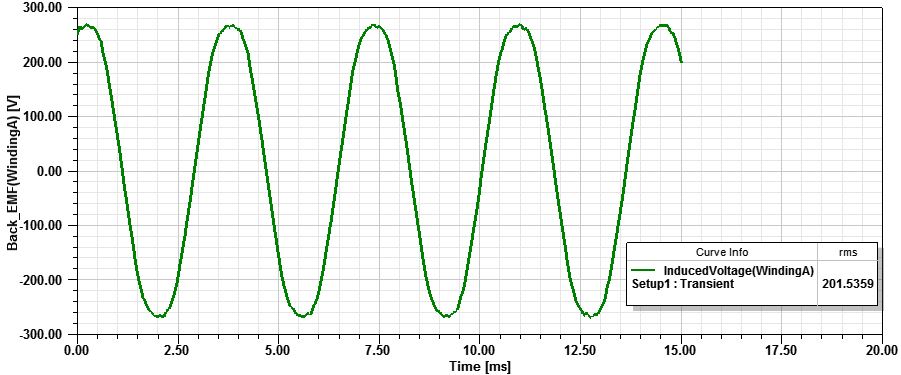
شکل 10) نمودار Back-EMF فاز A موتور ورنیر مغناطیس دائم با ابعاد بهینه
مقایسه نتایج بدست آمده
نتایج مربوط به مدل اولیه و مدل بهینه شده در جدول (1) با یکدیگر مقایسه شده اند. می توان نتیجه گرفت که مدل بهینه نسبت به مدل اولیه، موجب متوسط گشتاور و توان خروجی بیشتری شده است. در مورد ریپل گشتاور و تلفات هسته نیز عملکرد مدل بهینه نسبت به مدل اولیه بهتر است.

——————————————————————————————————————–
مرجع
[1]
L. Xu and et.al, “Quantitative comparison of integral and fractional slot permanent magnet Vernier motors”, IEEE Transactions on Energy Conversion, Vol. 30, Iss.4, Dec. 2015.
———————————————————————————————————————————-
توجه 1
شما می توانید برای در اختیارداشتن فایلهای شبیه سازی و بررسی مشخصات دیگر چون تلفات هسته، چگالی شار در هسته و … و همچنین انجام تحلیل پارامتری بر روی شبیه سازی ها از لینک خرید زیر استفاده کنید.
توجه داشته باشید که برای این پروژه یک گزارش کار 23 صفحه ای نیز تهیه شده که علاوه بر مطالب این صفحه دارای جزئیات بیشتری از پروژه – خصوصا در مورد روند بهینه سازی و نتایج نموداری مربوط به آن – می باشد. این فایل در دو فرمت ورد و پی دی اف موجود بوده و همراه با فایلهای شبیه سازی در اختیار شما قرار می گیرد.
توجه 2
در نظر داشته باشید که سفارش انجام این پروژه در سطح اینترنت چیزی در حدود 4 تا 5 برابر قیمت درج شده در اینجا هزینه دارد.
