
مقدمه
موتور القایی یا آسنکرون، پرکاربردترین موتور الکتریکی مورد استفاده در صنعت بوده که نسبت به موتورهای DC دارای مزایایی مانند بازده بالاتر، تعمیر و نگهداری کمتر و هزینه پایین تر می باشد. این موتورها با جریان متناوب تغذیه شده و ممکن است به طور مستقیم و یا غیر مستقیم به شبکه متصل شوند. معمولاً در توان های پایین تر اتصال به صورت مستقیم است اما در توان های بالا که جریان راه اندازی زیاد است، از مدار راه انداز استفاده می شود که بین منبع توان و موتور قرار می گیرد. وظیفه اصلی این مدار کاهش جریان راه اندازی و شروع به کار نرم موتور می باشد. راه اندازی ممکن است به شیوه های مختلف مثل استفاده از مقاومت راه انداز، مدار ستاره – مثلث، استفاده از اتوترانس و در نمونه های پیشرفته تر به کمک راه انداز نرم یا سافت استارتر انجام شود.
از طرفی دیگر بسته به نقطه کار ممکن است نیاز به طراحی یک سیستم کنترلی برای عملکرد با دقت بالای موتور باشد. در مواردی که سرعت کار موتور ثابت است یا تغییرات گشتاور بار ناچیز است، معمولاً احتیاجی به سیستم کنترل نمی باشد، اما در کاربردهایی که سرعت باید تغییر داده شود یا گشتاور بار در حین عملکرد موتور تغییر می کند و دقت عملکردی در اولویت قرار دارد، نیاز است که یک سیستم درایو برای کنترل مؤثر موتور طراحی شود.
در این پروژه ما قصد داریم بلوک یک موتور القایی را در چهارچوب مرجع abc پیاده سازی کرده و بدون اعمال کنترلی مؤثر بر روی آن، عملکرد آن را در حالتهای مختلف بی باری و بارداری مورد بررسی قرار دهیم. همچنین برای تعمیم کار انجام شده، مسائل راه اندازی در نظر گرفته شده و مورد تجزیه و تحلیل قرار خواهد گرفت. در انتها نیز یکی از مهمترین خطاهای رایج یعنی خطای اتصال کوتاه سه فاز را مدنظر قرار داده و تأثیر آن را به صورت کوتاه مدت بر عملکرد موتور بررسی خواهیم کرد.
مدلینگ موتور القایی در چهارچوب مرجع abc
همانطور که در درس تئوری جامع ماشین های الکتریکی بیان شده است، یک موتور القایی را می توان در سه چهارچوب اصلی یعنی مرجع abc، چرخشی سنکرون و مرجع روتور مدل سازی کرده و مورد تجزیه و تحلیل قرار دارد.
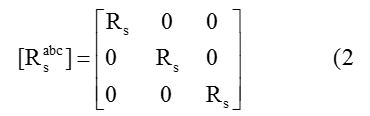
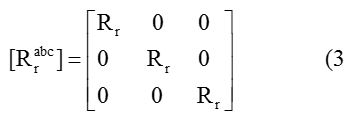
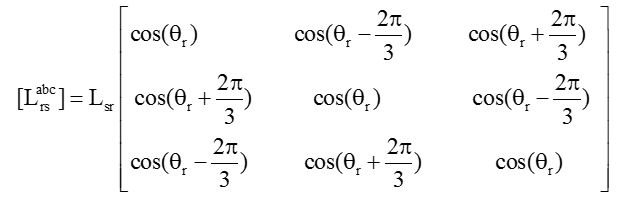
در چهارچوب مرجع abc معادلات ولتاژ و جریان مربوط به استاتور و روتور نسبت به سه محور b ، a و c که با یکدیگر 120 درجه اختلاف فازی دارند، بیان می شوند. اگر بخواهیم شکل ماتریسی معادلات اصلی ولتاژ را برای استاتور و روتور موتور القایی بیان کنیم، به صورت زیر خواهد بود:

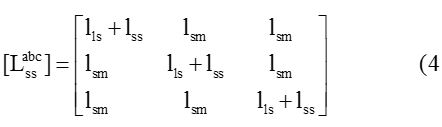
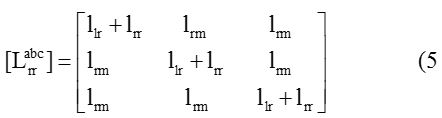
که در فرم ماتریس فوق هر یک از ولتاژها و جریان ها به صورت یک ماتریس سه در یک تعریف شده و مقاومت ها و اندوکتانس ها به صورت ماتریس سه در سه هستند. ماتریس های مقاومت و اندوکتانس به شرح زیر می باشند:
پروژه شبیه سازی شده:
در این پروژه یک موتور القایی قفسه سنجابی چهار قطبه با توان 50 اسب بخار در نظر گرفته شده که به طور مستقیم با ولتاژ نامی 460 ولت سه فاز با فرکانس 60 هرتز تغذیه می شود. بلوک کلی موتور که در چهارچوب مرجع abc مدل سازی شده، در شکل 1 نمایش داده شده است.
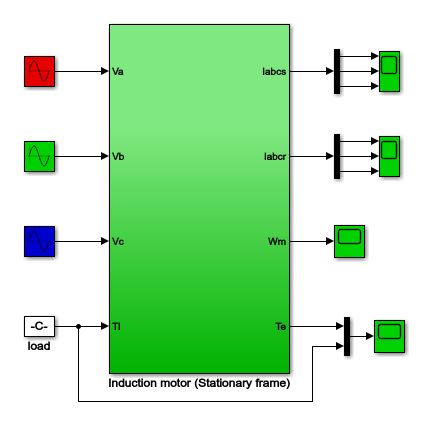
شکل 1) بلوک موتور القایی مدل سازی شده در چهارچوب مرجع abc
برای تجزیه و تحلیل موتور موردنظر از محیط سیمولینک نرم افزار متلب استفاده شده است و شبیه سازی در چندین مرحله انجام می شود که به شرح زیر است:
مرحله اول: شبیه سازی در حالت بی باری و سپس اتصال بار خطی به موتور
مرحله دوم: شبیه سازی در حالت بارداری با افزایش تدریجی بار
مرحله سوم: راه اندازی به کمک مدار شبیه ساز ستاره – مثلث
مرحله چهارم: بررسی خطای اتصال کوتاه سه فاز در ولتاژ ورودی تغذیه
مرحله اول:
ابتدا موتور را در شرایط بی باری راه اندازی می کنیم و سپس در لحظه 1 ثانیه، یک بار خطی به آن اعمال می کنیم تا به مقدار گشتاور نامی خود برسد. در ادامه بعضی از نتایج خروجی در شکل های 2 تا 4 نمایش داده شده است.
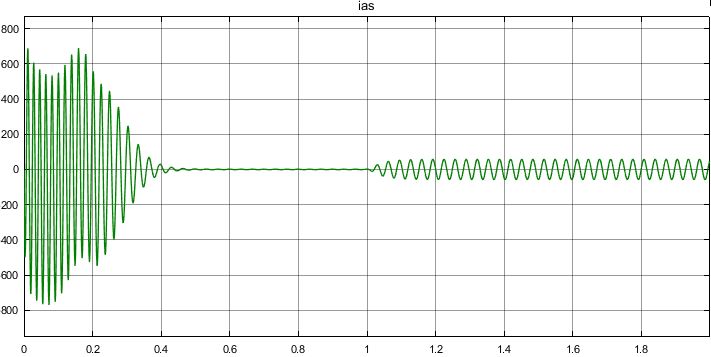
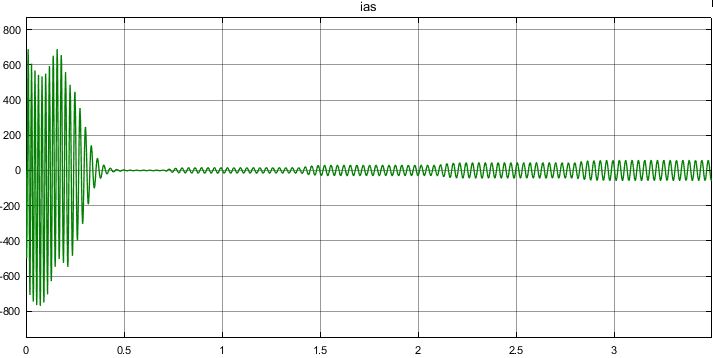
شکل 2) جریان فاز A استاتور در مرحله اول
با بررسی مشخصه جریان در شکل 2 معلوم می شود که مقدار پیک جریان از 1.28 آمپر به 57.5 آمپر افزایش می یابد.
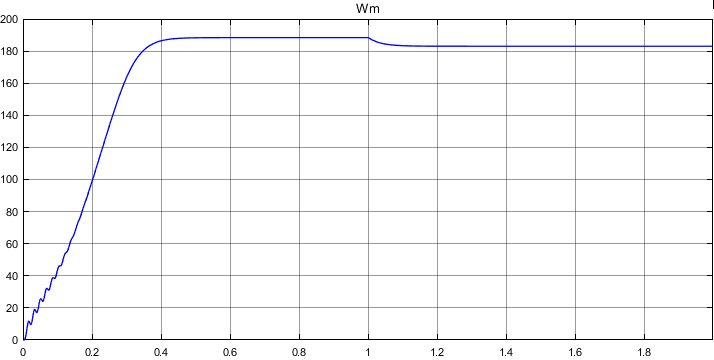
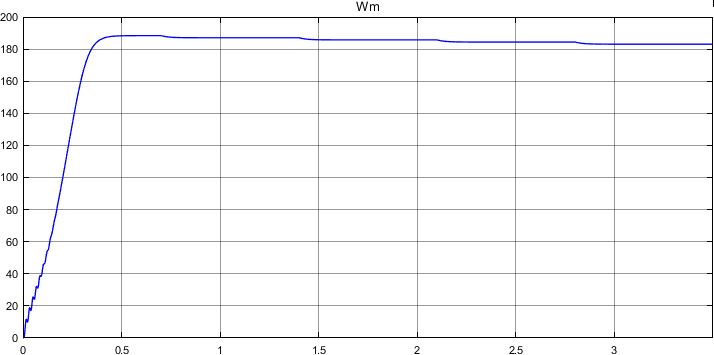
شکل 3) سرعت چرخشی موتور در مرحله اول
با بررسی مشخصه سرعت در شکل 3 معلوم می شود که مقدار آن در شرایط ماندگار بی باری 188.4 رادیان بر ثانیه است که در شرایط ماندگار بارداری کاهش یافته و به 183 رادیان بر ثانیه می رسد.
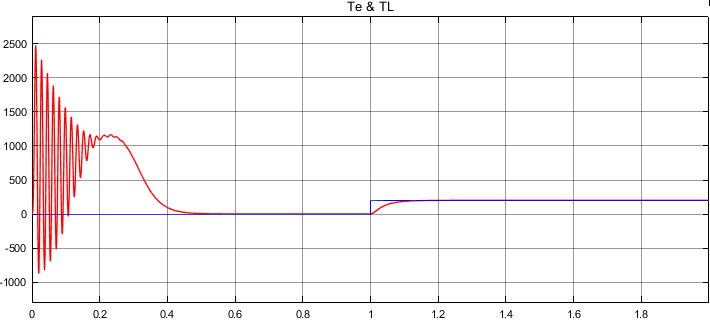
شکل 4) گشتاور دینامیکی و گشتاور بار در مرحله اول
با بررسی مشخصه گشتاور مشخص می شود که اولا گشتاور دینامیکی موتور به خوبی گشتاور بار را دنبال می کند ثانیا مقدار متوسط گشتاور در شرایط بی باری تقریبا صفر بوده که در شرایط بارداری به مقدار 203 نیوتن بر متر افزایش می یابد.
مرحله دوم:
در این آزمایش قصد داریم ابتدا موتور را در شرایط بی باری راه اندازی کنیم و سپس بار را به صورت ثابت و پله های 25 درصدی افزایش دهیم تا به مقدار نامی خود برسد. در این مرحله زمان آزمایش بیشتر از مرحله قبل بوده و زمان های تغییر بار برای مقدارهای 50، 100، 150 و 198 نیوتن بر متر به ترتیب 0.7، 1.4، 2.1 و 2.8 ثانیه خواهد بود. در ادامه نتایج در شکل های 5 تا 7 نشان داده شده است.
شکل 5) جریان فاز A استاتور در مرحله دوم
با بررسی مشخصه جریان فاز A در شکل 5 معلوم می شود که مقدار پیک آن با افزایش تدریجی بار، رفته رفته بیشتر می شود تا اینکه به ازای بار نامی 198 نیوتن بر متر به 57.15 آمپر می رسد.
شکل 6) سرعت چرخشی موتور در مرحله دوم
با توجه به شکل 6 مقدار سرعت با افزایش بار به تدریج کم می شود و در هر پله در مقداری کمتر از مقدار قبلی به تثبیت می رسد. البته باید توجه کرد که می توان با اعمال یک کنترل مناسب بر روی سرعت موتور در یک سیستم حلقه بسته مقدار سرعت را ثابت حفظ کرد تا در طول شرایط متغیر بار، مقدار آن تغییری نکند.
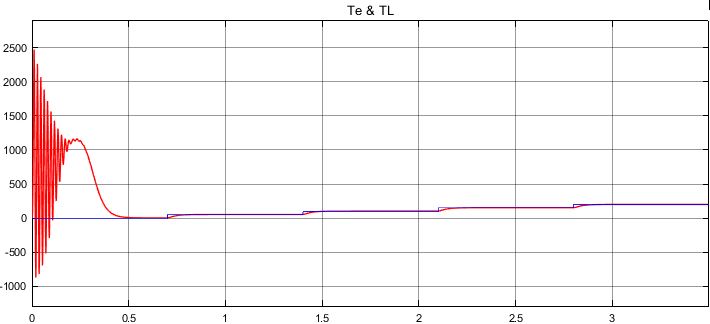
شکل 7) گشتاور دینامیکی و گشتاور بار در مرحله دوم
در شکل 7 تغییرات گشتاور همگام با تغییر پله های بار می باشد و بعد از هر افزایش در مقدار بار، مقدار گشتاور دینامیکی موتور نیز افزایش می یابد.
مرحله سوم:
در این مرحله موتور در شرایط بی باری قرار دارد و مسئله راه اندازی به کمک شبیه ساز ستاره – مثلث انجام خواهد شد. ابتدا مدار با ولتاژ ستاره راه اندازی شده و سپس در لحظه 2.5 ثانیه ولتاژ مثلث به موتور اعمال می شود. در انتها نیز در زمان 4 ثانیه موتور از حالت بی باری به حالت بارداری رسیده و تحت یک بار خطی متناسب با سرعت عمل خواهد کرد. تعدادی از نتایج این مرحله در ادامه ارائه شده است.
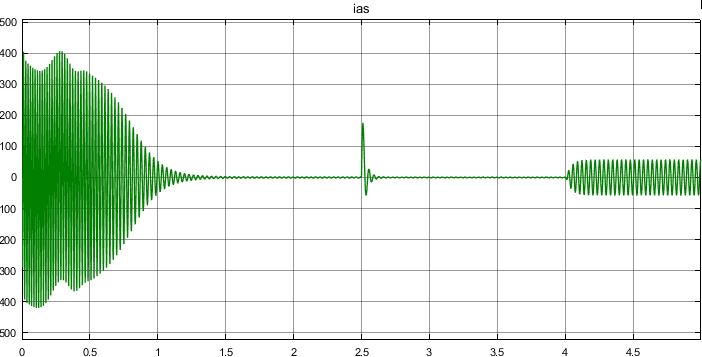
شکل 8) جریان فاز A استاتور در مرحله سوم
اگر مشخصه جریان در شکل 8 با مشخصه آن در مرحله اول یعنی شکل 2 مقایسه شود، کاهش دامنه جریان در لحظات ابتدایی مشهود هست. همچنین در لحظه اتصال ولتاژ مثلث به فازهای موتور، گشتاور دچار یک پیک مثبت شده که بلافاصله از شدت آن کاسته شده و بعد از نوسانی کوتاه گشتاور به مقدار ماندگار خود بر می گردد. در لحظه 4 ثانیه نیز با اعمال بار خطی به موتور، جریان افزایش یافته و بالطبع آن گشتاور دینامیکی موتور افزایش می یابد.
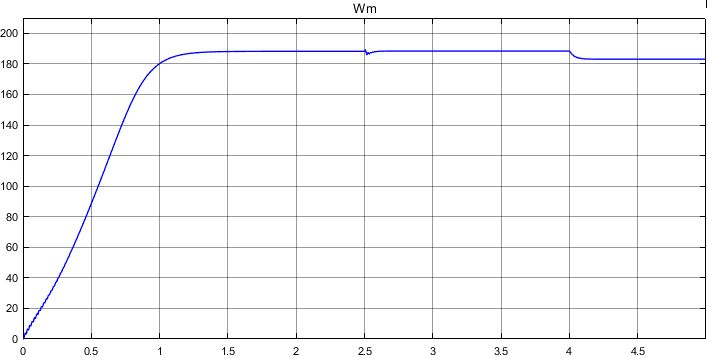
شکل 9) سرعت چرخشی موتور در مرحله سوم
با توجه به مشخصه سرعت در شکل 9، مقدار آن در شرایط بی باری افزایش یافته و به مقدار ماندگار خود یعنی 188.2 رادیان بر ثانیه می رسد. در لحظه اتصال ولتاژ مثلث به فازهای موتور، سرعت به حدود 186 رادیان بر ثانیه کاهش می یابد اما بلافاصله مقدار آن افزایش یافته و به مقدار ماندگار قبلی خود می رسد. در لحظه 4 ثانیه نیز با توجه به افزایش گشتاور، سرعت موتور کاهش یافته و سپس در مقدار 183 رادیان بر ثانیه تثبیت می شود.
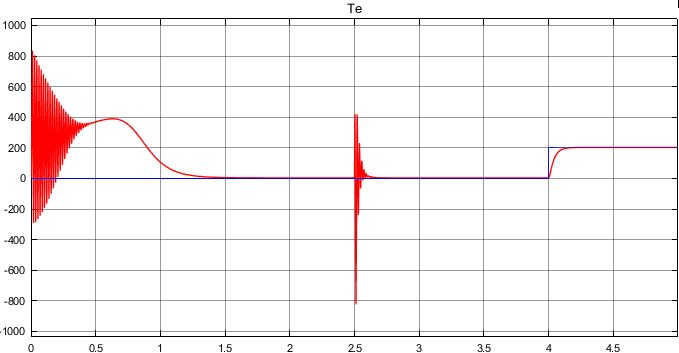
شکل 10) گشتاور دینامیکی و گشتاور بار در مرحله سوم
اما در مورد مشخصه گشتاور دینامیکی در شکل 10 نیز به وضوح مشخص است که در لحظات ابتدایی پیک مثبت و منفی گشتاور نسبت به مرحله اول کاهش قابل توجه داشته و بعد از نوساناتی چند به حالت پایدار خود می رسد. در لحظه اتصال ولتاژ مثلث گشتاور یک پیک منفی در حدود 800 نیوتن بر متر را تجربه می کند اما بلافاصله بعد از آن این پیک کاهش یافته و بعد از نوساناتی کوتاه گشتاور دوباره به مقدار ماندگار خود بر می گردد. در لحظه 4 ثانیه نیز با اعمال بار به موتور، گشتاور دینامیکی افزایش یافته و به خوبی گشتاور بار را دنبال می کند.
مرحله چهارم:
در این مرحله موتور ابتدا در حالت بی باری و سپس حالت بارداری کار می کند. در زمان بارداری سپس یک خطای اتصال کوتاه سه فاز در لحظه 2 ثانیه اتفاق می افتد و سپس در زمان 2.4 ثانیه برطرف می شود. در این حالت اثر آن بر مشخصات موتور بررسی شده است که در ادامه ارائه شده است.
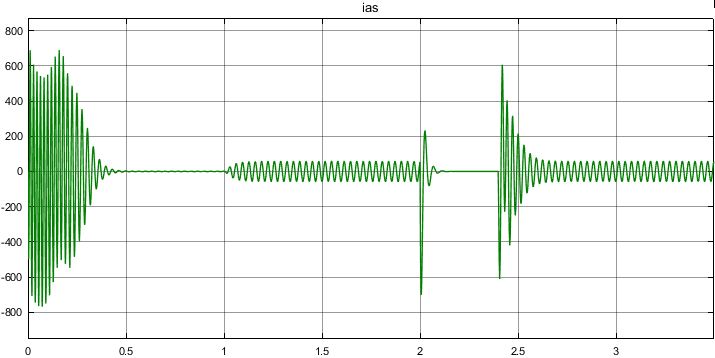
شکل 11) جریان فاز A استاتور در مرحله چهارم
همانطور که از شکل 11 مشخص است، در لحظه 2 یک پیک منفی بزرگ در شکل موج ایجاد می شود و سپس جریان با نوسانی خیلی کوتاه به صفر می رسد. این حالت ادامه دارد تا اینکه در لحظه 2.4 ثانیه شکل موج دچار یک پیک منفی و سپس مثبت می شود و بعد از آن با نوساناتی چند به حالت پایدار خود قبل از خطا می رسد.
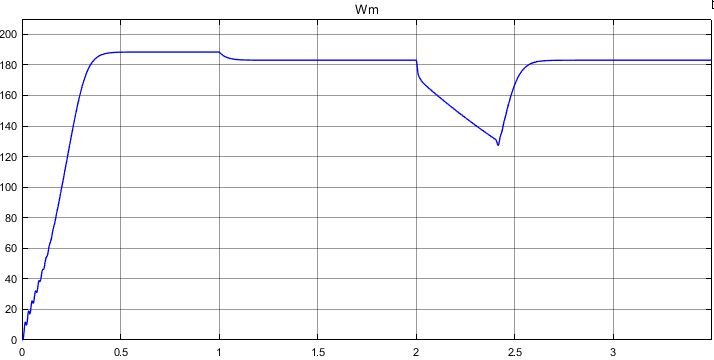
شکل 12) سرعت چرخشی موتور در مرحله چهارم
در شکل 12 در لحظه 2 یک افت در نمودار ایجاد می شود و سرعت تا 127 رادیان بر ثانیه نیز افت می کند اما سپس برگشته و دوباره افزایش می یابد تا اینکه تقریبا در لحظه 2.68 ثانیه به مقدار ماندگار خود قبل از خطا می رسد.
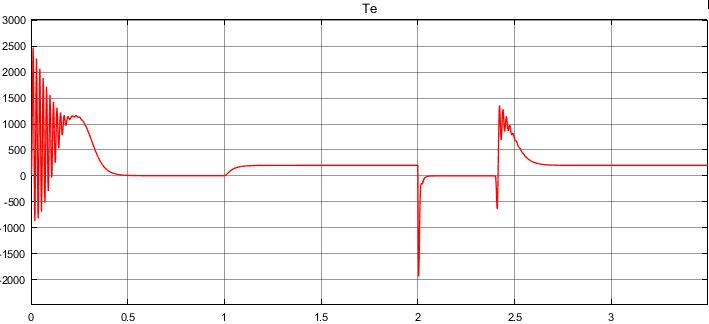
شکل 13) گشتاور دینامیکی و گشتاور بار در مرحله چهارم
در نمودار گشتاور در شکل 13 نیز در لحظه خطا یک پیک منفی بزرگ در حدود 1938 نیوتن بر متر ایجاد می شود و پس از آن گشتاور افزایش می یابد تا به مقدار تقریبی صفر برسد. این حالت سپس ادامه می یابد تا اینکه در لحظه 2.4 ثانیه ابتدا یک پیک منفی ایجاد می شود که شدت آن نسبت به لحظه وقوع خطا کمتر است و سپس یک پیک مثبت به اندازه 1356 نیوتن بر متر در مشخصه ایجاد می شود.پس از این گشتاور چند نوسان مثبت را تجربه کرده تا در نهایت مقدار آن به حالت قبل از خطا برسد.
——————————————————————————————-
توجه: در این مقاله تعدادی از نتایج شبیه سازی بلوک موتور القایی در چهارچوب مرجع abc ارائه شده و عملکرد آن در حالتهای مختلفی بی باری و بارداری و همچنین در دوره وقوع خطا بررسی شد. شما مخاطبان عزیز می توانید برای بررسی مشخصه های دیگر موجود در شبیه سازی و همچنین آشنایی با جزئیات طراحی بلوک موتور شبیه سازی های انجام شده را در قالب یک فایل فشرده از لینک زیر خریداری کنید.
پارامترهای بلوک موتور استفاده شده در این شبیه سازی ها براحتی قابل تغییر بوده و این بلوک برای استفاده در شبیه سازی های دیگر بسیار مناسب می باشد.
